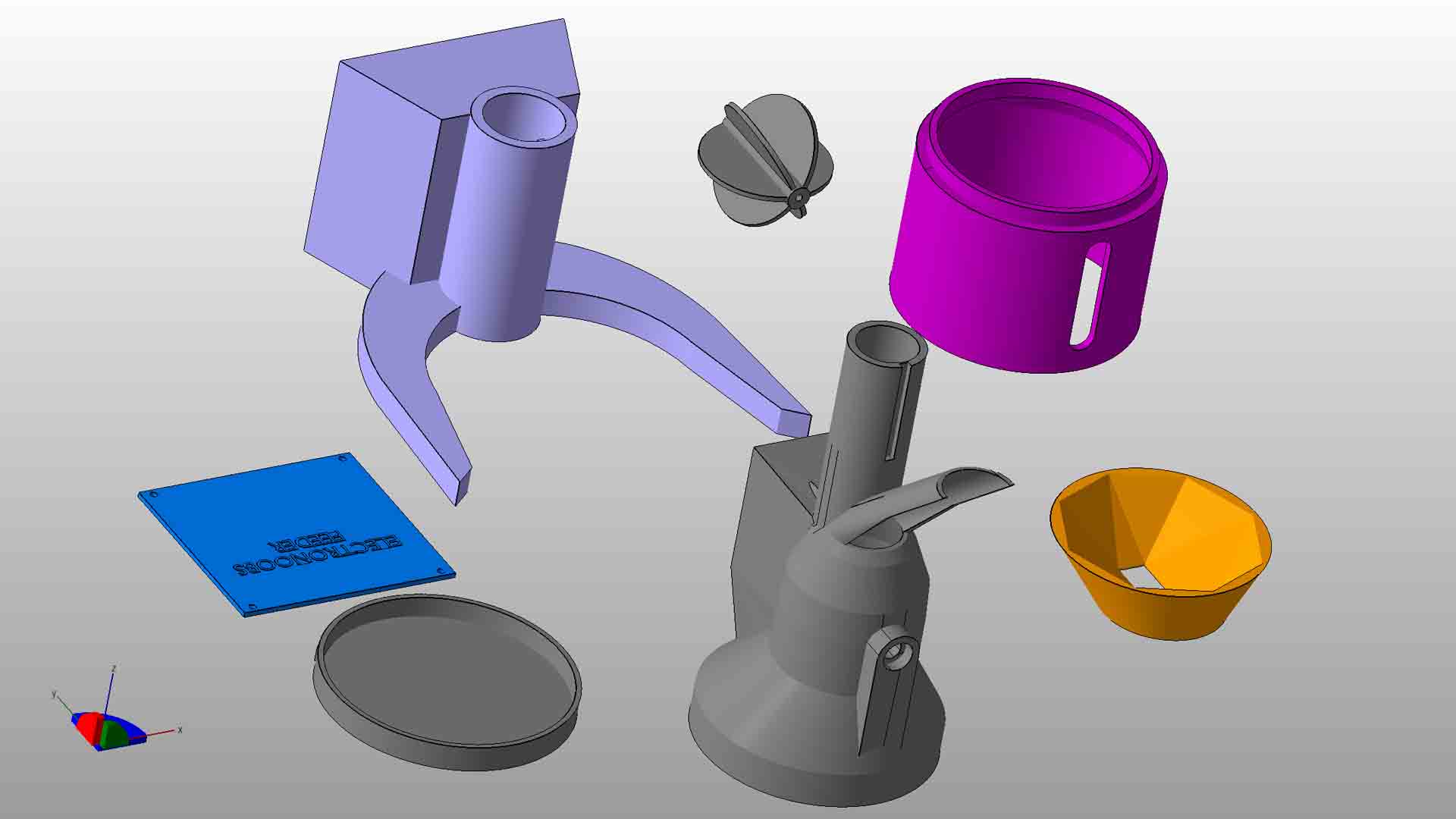
You will need my design for the 3D printed parts so download them from below. We have the feeder support base. Then we have the main feeder body that will go inside the support. We have the hopper that will go inside that main body part where the motor will go. The bottom body part also has a case behind where we can place the electronics such as the Arduino, real time clock, maybe a buzzer and some buttons. Then, we have two more small parts, the top cap and the cover of the electronics case. Finally, we have the inside feeder divider. This part will rotate inside and control the amount of foot that will get out. Everything was printed with PLA material and without support. I’ve used 2 perimeters, 20% infill, 0.25mm layer height and 0.4mm nozzle.