
This is the code used with the Electric longboard project. This will read the PWM valeus from the radio receiver using interruptions. And then it will map the valeus to the desired range and also add a small delay so the acceleration won't be too fast.
/* Code for electric longboard PWM code
* Tutorial webpage: https://www.electronoobs.com/eng_robotica_tut12.php
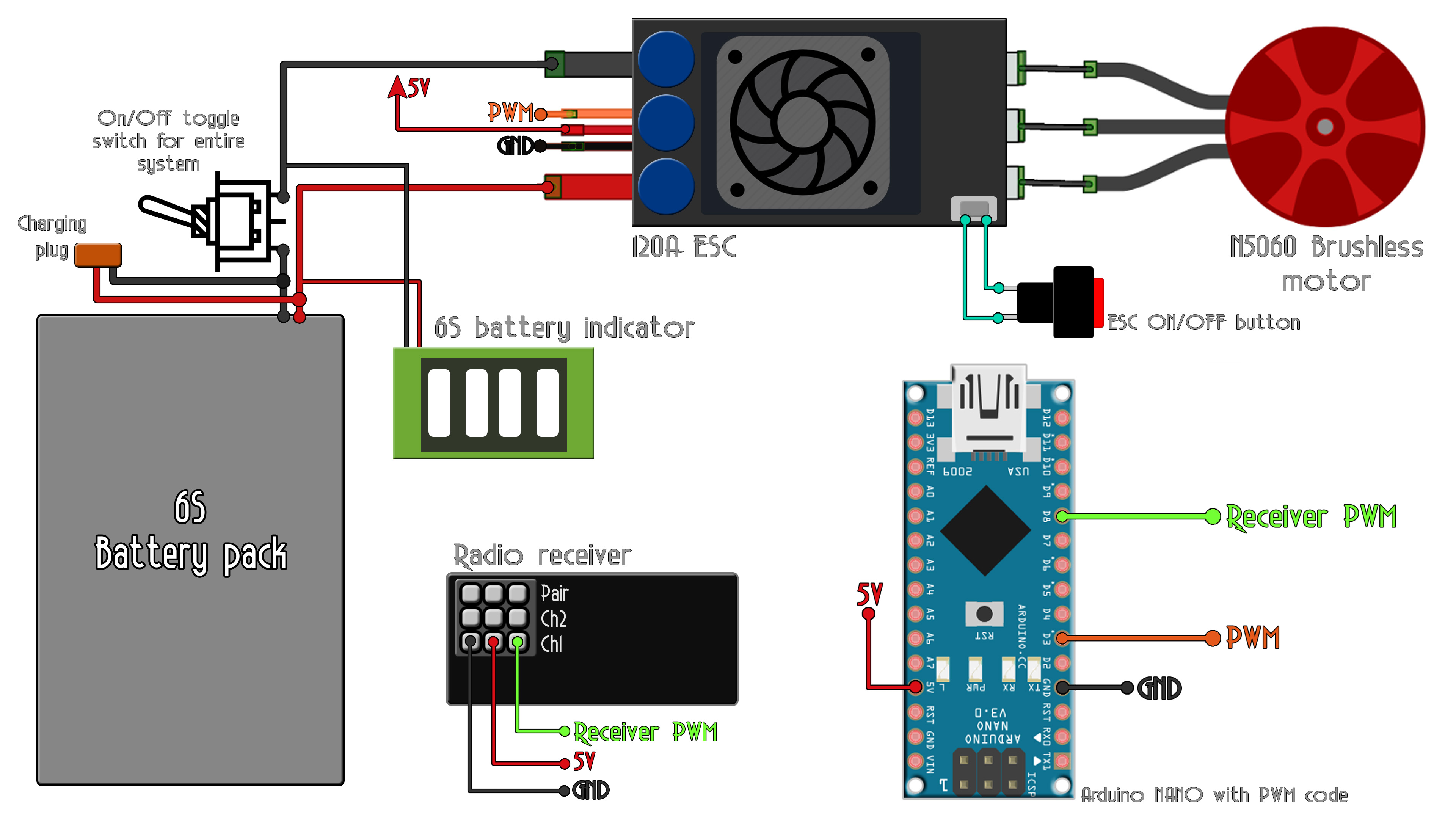
* Schematic: https://www.electronoobs.com/eng_robotica_tut12_sch1.php
* Part list: https://www.electronoobs.com/eng_robotica_tut12_parts1.php */
#include <Servo.h>; //We need this library for the PWm signal
Servo motor; //We create the servo pin, later attach to D3
//We create variables for the time width values of each PWM input signal
unsigned long counter_1, current_count;
//We create 4 variables to stopre the previous value of the input signal (if LOW or HIGH)
byte last_CH1_state;
int THROTTLE = 1500;
int LAST_THROTTLE = 1500;
int PWM_VALUE = 1500;
int THROTTLE_MAPED = 0;
void setup() {
motor.attach(3);
motor.writeMicroseconds(1505); //The range of this ESC is 1000us to 1500 for CW and 1500 to 2000us for CCW
PCICR |= (1 << PCIE0); //enable PCMSK0 scan
PCMSK0 |= (1 << PCINT0); //Set pin D8 trigger an interrupt on state change.
Serial.begin(250000);
delay(500);
}
void loop() {
/*My ESC has ranges from 1500 to 2100 for forward adn from 1500 to 1000 for backwards*/
THROTTLE_MAPED = map(THROTTLE,1085,2100,1000,2000); //Change the range here.
THROTTLE_MAPED = THROTTLE_MAPED - 50;
if(THROTTLE_MAPED > 1480)
{
if(THROTTLE_MAPED > PWM_VALUE)
{
PWM_VALUE = PWM_VALUE + 1;
delay(7);
LAST_THROTTLE = THROTTLE_MAPED;
}
if(THROTTLE_MAPED < PWM_VALUE)
{
PWM_VALUE = PWM_VALUE - 1;
delay(7);
LAST_THROTTLE = THROTTLE_MAPED;
}
PWM_VALUE = constrain(PWM_VALUE,1505,2100);
}
if(THROTTLE_MAPED < 1450)
{
if(THROTTLE_MAPED < PWM_VALUE)
{
PWM_VALUE = PWM_VALUE - 1;
delayMicroseconds(2000);
LAST_THROTTLE = THROTTLE_MAPED;
}
PWM_VALUE = constrain(PWM_VALUE,1350,2100);
}
motor.writeMicroseconds(PWM_VALUE); //Finally write the PWM signal on pin D3
}
ISR(PCINT0_vect){
//First we take the current count value in micro seconds using the micros() function
current_count = micros();
///////////////////////////////////////PWM input from receiver on D8
if(PINB & B00000001){ //We make an AND with the pin state register, We verify if pin 8 is HIGH???
if(last_CH1_state == 0){ //If the last state was 0, then we have a state change...
last_CH1_state = 1; //Store the current state into the last state for the next loop
counter_1 = current_count; //Set counter_1 to current value.
}
}
else if(last_CH1_state == 1){ //If pin 8 is LOW and the last state was HIGH then we have a state change
last_CH1_state = 0; //Store the current state into the last state for the next loop
THROTTLE = current_count - counter_1; //We make the time difference. Channel 1 is current_time - timer_1.
}
}







