
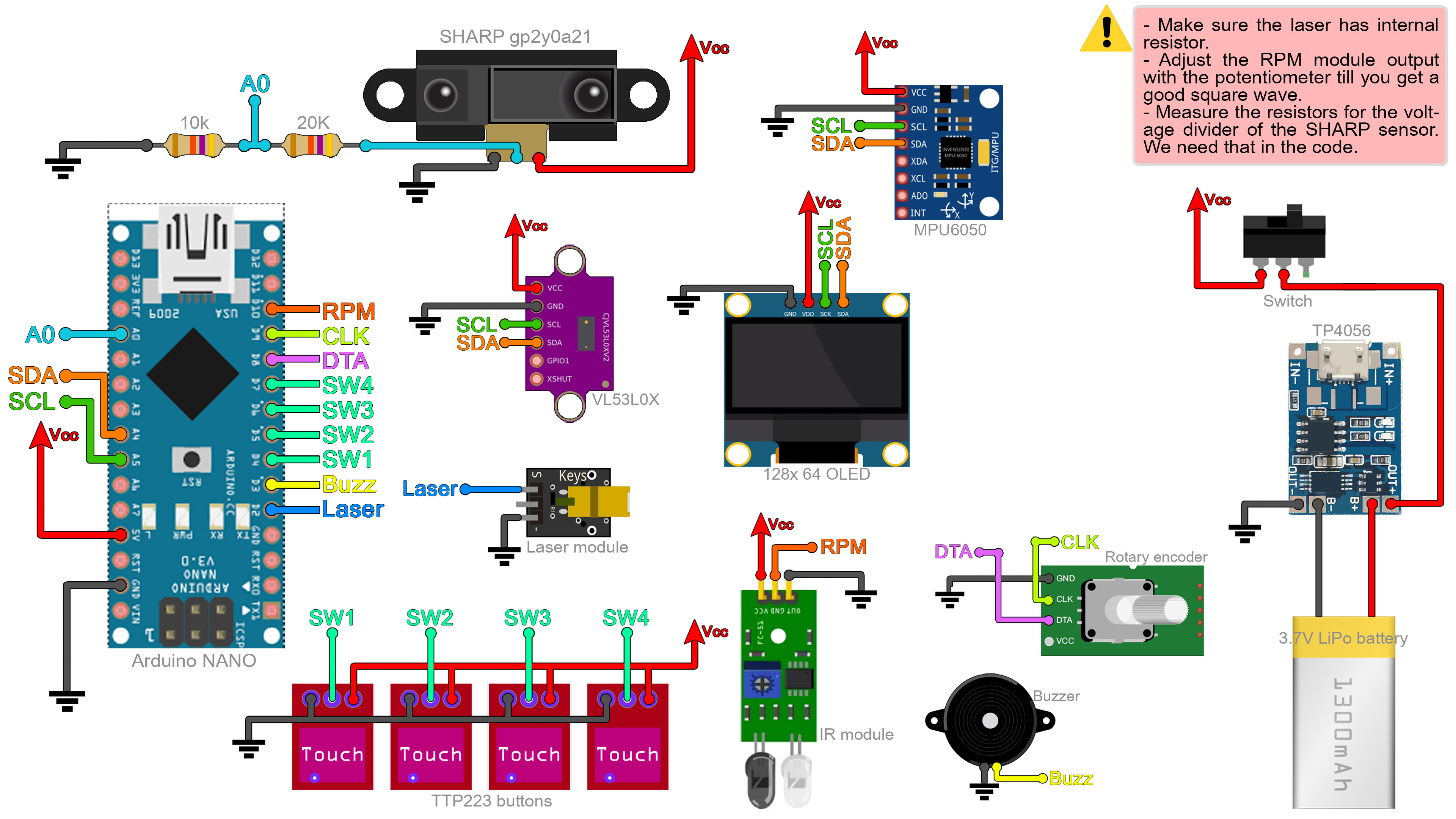
This is the code for the Arduino multi-meter distance,length, RPM, angle and level meter project with 3D case. Read all comments in the code in order to understand more.
////////////////////////Libraries
#include <Wire.h>
#include <Adafruit_GFX.h> //download here: https://www.electronoobs.com/eng_arduino_Adafruit_GFX.php
#include <Adafruit_SSD1306.h> //downlaod here: https://www.electronoobs.com/eng_arduino_Adafruit_SSD1306.php
#include <VL53L0X.h> //downlaod here: https://www.electronoobs.com/eng_arduino_VL53L0X.php
////////////////////////
////////////////////////OLED 64x124 display with i2c
#define OLED_RESET 11
Adafruit_SSD1306 display(OLED_RESET);
////////////////////////
static const unsigned char PROGMEM LOGO[] ={
/* 0X00,0X01,0X80,0X00,0X1F,0X00, */
0X00,0X38,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0XFE,0X00,0X00,0X00,0X70,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X01,0XFF,0X0F,0XBF,0XF7,0X7F,0X80,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X01,0XFF,0X8F,0X1F,0XFF,0XFF,0XC0,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X03,0XFF,0X8F,0XDF,0XFF,0XFF,0XC0,0X30,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X07,0XFF,0XCF,0XDF,0XFF,0XFF,0XE0,0X3F,0X07,0XE6,0X0F,0XC3,0X9F,0XEF,0X81,0XE0,
0X07,0XFF,0XCF,0X9F,0XFF,0XFF,0XE0,0X3F,0X8F,0XEE,0X0F,0XCF,0XDF,0XEF,0XE3,0XF0,
0X07,0XFF,0XCF,0X7F,0XFF,0XFF,0XE0,0X3F,0X0F,0X0E,0X0E,0X0E,0X67,0X8E,0XE7,0X38,
0X0F,0XFE,0X6F,0X70,0X00,0XFF,0XF0,0X7F,0X0F,0X0E,0X0E,0X1C,0X67,0X8E,0XE7,0X38,
0X08,0X30,0X6F,0XE0,0X00,0XFF,0XF0,0X7F,0X0F,0XCE,0X0F,0X9C,0X07,0X8E,0XE7,0X3C,
0X08,0X00,0X6F,0XE0,0X00,0XFF,0XF8,0X7F,0X0F,0XCE,0X0F,0X9C,0X07,0X8F,0XCF,0X3C,
0X08,0X00,0X2F,0XFF,0XFC,0XFF,0XF8,0X7F,0X0F,0X0E,0X0E,0X1C,0X27,0X8E,0XE7,0X3C,
0X08,0X00,0X2F,0XFF,0XFC,0XFF,0XF8,0X7F,0X0F,0X0E,0X0E,0X1C,0X27,0X8E,0XE7,0X38,
0X00,0X00,0X1F,0XFF,0XFC,0XFD,0XFC,0X7F,0X0F,0X0E,0X0E,0X1E,0X67,0X8E,0XE7,0X38,
0X03,0X8E,0X1F,0XFF,0XFC,0XFC,0XFC,0X7F,0X0F,0XEF,0XEF,0XCF,0XC7,0X8E,0XE3,0XF0,
0X00,0X00,0X1F,0XFF,0XFC,0XFC,0XFE,0XFF,0X00,0X18,0X43,0XC1,0XE1,0XF0,0X78,0X00,
0X00,0X00,0X2C,0XFF,0XFC,0XF8,0X72,0XFE,0X00,0X1C,0X4E,0XE3,0X31,0XDC,0XCC,0X00,
0X00,0X00,0X6D,0XE0,0X01,0XF4,0X32,0XFE,0X00,0X1E,0X4E,0X67,0X39,0XDD,0X8C,0X00,
0X00,0X00,0X0B,0XE0,0X01,0XEC,0X03,0XFE,0X00,0X1E,0X4E,0X77,0X39,0XDD,0XE0,0X00,
0X00,0X00,0X03,0XE0,0X01,0XFC,0X21,0XFE,0X00,0X1F,0X5E,0X77,0X39,0XF8,0XF8,0X00,
0X00,0X00,0X0B,0XF0,0X03,0XDC,0X3F,0XFE,0X00,0X1F,0XDE,0X77,0X39,0XFC,0XFC,0X00,
0X00,0X70,0X89,0XFF,0XFF,0XFC,0X1F,0XFE,0X00,0X13,0XCE,0X77,0X39,0XDC,0X3C,0X00,
0X02,0X00,0X08,0XFF,0XFF,0XF8,0X1F,0XFE,0X00,0X13,0XCE,0X77,0X39,0XDD,0X8C,0X00,
0X01,0X00,0X0C,0XFF,0XFF,0XF8,0X1F,0XFE,0X00,0X11,0XCE,0X67,0X39,0XDD,0X8C,0X00,
0X01,0X06,0X8D,0XFF,0XFF,0XF8,0X1F,0XFE,0X00,0X11,0XC7,0XE3,0XF1,0XFC,0XFC,0X00,
0X00,0X1B,0X89,0XFF,0XFF,0XF8,0X0F,0XFC,0X00,0X00,0X01,0X80,0XC0,0X00,0X70,0X00,
0X00,0X09,0X8B,0XFF,0XFC,0XF8,0X0F,0XFC,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X0D,0XC0,0X00,0X00,0X00,0X0F,0XFC,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X07,0XC0,0X00,0X00,0X00,0X07,0XFC,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X07,0X80,0X00,0X00,0X00,0X00,0XFC,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X01,0X00,0X00,0X00,0X00,0X00,0X08,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
};
//INPUTS/OUTPUTS
#define zero_button 4
#define mode_button 5
#define plus_button 6
#define sound_button 7
#define rot_data 8
//#define rot_clock 9
#define battery_in A0
#define sharp_in A1
#define IR_rpm_in 10
#define laser_out 2
#define buzzer 3
//Variables
bool mode_button_state = false;
bool zero_button_state = false;
bool plus_button_state = false;
bool sound_button_state = false;
int mode = 0;
float battery_level = 3.7;
//For Sharp sensor
int Sharp_cm_previous;
//For VL53L0X sensor
VL53L0X sensor;
int VL53L0X_mm_previous;
//Rotary encoder
int counter = 0;
bool data_state;
bool sound = false;
bool laser = false;
//MPU6050 gyro/acc
//Gyro Variables
float elapsedTime, time, timePrev; //Variables for time control
int gyro_error=0; //We use this variable to only calculate once the gyro data error
float Gyr_rawX, Gyr_rawY, Gyr_rawZ; //Here we store the raw data read
float Gyro_angle_x, Gyro_angle_y, Gyro_angle_z; //Here we store the angle value obtained with Gyro data
//Acc Variables
int acc_error=0; //We use this variable to only calculate once the Acc data error
float rad_to_deg = 180/3.141592654; //This value is for pasing from radians to degrees values
float Acc_rawX, Acc_rawY, Acc_rawZ; //Here we store the raw data read
float Acc_angle_x, Acc_angle_y; //Here we store the angle value obtained with Acc data
float Total_angle_x, Total_angle_y, Total_angle_z;
int Z_loop = 0;
bool Z_error = false;
float Gyr_rawZ_error = 0;
float angle_x_error = -6.6;
float angle_y_error = 3.6;
int print_time = 0;
//IR sensor
//We create variables for the time width values of each PWM input signal
unsigned long counter_1, current_count;
//We create 4 variables to stopre the previous value of the input signal (if LOW or HIGH)
byte last_IR_state;
//To store the 1000us to 2000us value we create variables and store each channel
int width; //In my case channel 4 of the receiver and pin D12 of arduino
bool IR_enable = false;
void setup() {
//Serial.begin (9600);
analogReference(INTERNAL);
//Define the pins as INPUT or OUTPUT and set them to LOW or HIGH
pinMode(zero_button, INPUT);
pinMode(mode_button, INPUT);
pinMode(plus_button, INPUT);
pinMode(sound_button, INPUT);
pinMode(rot_data, INPUT_PULLUP);
//pinMode(rot_clock, INPUT_PULLUP);
pinMode(battery_in, INPUT);
pinMode(sharp_in, INPUT);
pinMode(IR_rpm_in, INPUT);
pinMode(laser_out, OUTPUT);
pinMode(buzzer, OUTPUT);
digitalWrite(laser_out,LOW);
digitalWrite(buzzer,LOW);
PCICR |= (1 << PCIE0); //enable PCMSK0 scan
PCMSK0 |= (1 << PCINT0); //Set pin D8 trigger an interrupt on state change.
//PCMSK0 |= (1 << PCINT1); //Set pin D9 trigger an interrupt on state change.
PCMSK0 |= (1 << PCINT2); //Set pin D10 trigger an interrupt on state change.
//OLED display settings...
display.begin(SSD1306_SWITCHCAPVCC, 0x3C); // initialize with the I2C addr 0x3C (for the 128x32 or 64 from eBay)
delay(100);
display.clearDisplay();
display.drawBitmap(0, 8, LOGO, 128, 31, 1);
display.display();
delay(1000);
display.clearDisplay();
display.display();
//VL53L0X sensor
sensor.init();
sensor.setTimeout(500);
sensor.setMeasurementTimingBudget(200000);
//MPU6050 gyro/acc
Wire.begin(); //begin the wire comunication
Wire.beginTransmission(0x68); //begin, Send the slave adress (in this case 68)
Wire.write(0x6B); //make the reset (place a 0 into the 6B register)
Wire.write(0x00);
Wire.endTransmission(true); //end the transmission
//Gyro config
Wire.beginTransmission(0x68); //begin, Send the slave adress (in this case 68)
Wire.write(0x1B); //We want to write to the GYRO_CONFIG register (1B hex)
Wire.write(0x10); //Set the register bits as 00010000 (1000dps full scale)
Wire.endTransmission(true); //End the transmission with the gyro
//Acc config
Wire.beginTransmission(0x68); //Start communication with the address found during search.
Wire.write(0x1C); //We want to write to the ACCEL_CONFIG register
Wire.write(0x10); //Set the register bits as 00010000 (+/- 8g full scale range)
Wire.endTransmission(true);
time = millis();
}
void loop() {
analogReference(INTERNAL);
battery_level = map(analogRead(battery_in),0,1024, 0, 4730);
battery_level = battery_level / 1000;
/////////////////////////////////CHANGE THE MODE/////////////////////////////////
if(digitalRead(mode_button) && !mode_button_state)
{
data_state = digitalRead(rot_data);
mode_button_state = true;
Z_error = false;
Z_loop = 0;
IR_enable = false;
Gyr_rawZ_error = 0;
print_time = 0; //Reset print time for angle mode (for MODE 3 and MODE 4)
mode = mode + 1;
if(sound)
{
digitalWrite(buzzer, HIGH);
delay(15);
digitalWrite(buzzer, LOW);
}
if(mode > 5)
{
mode = 0;
}
}
if(!digitalRead(mode_button) && mode_button_state)
{
mode_button_state = false;
}
/////////////////////////////////////////////////////////////////////////////////
/////////////////////////////////ZERO the values/////////////////////////////////
if(digitalRead(zero_button) && !zero_button_state)
{
counter = 0;
Z_error = false;
Total_angle_z = 0;
zero_button_state = true;
if(sound)
{
digitalWrite(buzzer, HIGH);
delay(15);
digitalWrite(buzzer, LOW);
}
}
if(!digitalRead(zero_button) && zero_button_state)
{
zero_button_state = false;
}
/////////////////////////////////////////////////////////////////////////////////
/////////////////////////////////SOUND ON OFF////////////////////////////////////
if(digitalRead(sound_button) && !sound_button_state)
{
sound = !sound;
sound_button_state = true;
if(sound)
{
digitalWrite(buzzer, HIGH);
delay(15);
digitalWrite(buzzer, LOW);
}
}
if(!digitalRead(sound_button) && sound_button_state)
{
sound_button_state = false;
}
/////////////////////////////////////////////////////////////////////////////////
/////////////////////////////////PLUS BUTTON////////////////////////////////////
if(digitalRead(plus_button) && !plus_button_state)
{
laser = !laser;
digitalWrite(laser_out, laser);
plus_button_state = true;
if(sound)
{
digitalWrite(buzzer, HIGH);
delay(15);
digitalWrite(buzzer, LOW);
}
}
if(!digitalRead(plus_button) && plus_button_state)
{
plus_button_state = false;
}
/////////////////////////////////////////////////////////////////////////////////
///////////////////////////////////////MODE 0////////////////////////////////////
if(mode == 0)
{
//analogReference(DEFAULT);
float Sharp_read = analogRead(sharp_in); // lectura del sensor 0
float Sharp_cm = pow(4727.4 / Sharp_read, 1.2134); // conversion to cm
int Sharp_cm_int = Sharp_cm;
float Sharp_inch = Sharp_cm * 0.393701;
if (Sharp_cm > 10 && Sharp_cm < 80)
{
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(BLACK,WHITE);
display.setCursor(0,0);
display.print("1-Distance");
display.setTextColor(WHITE);
display.setCursor(95,0);
display.print(battery_level);
display.print("V");
display.setTextSize(2);
display.setCursor(0,30);
display.print("cm: ");
display.print(Sharp_cm,0);
display.setCursor(0,50);
display.print("in: ");
display.print(Sharp_inch,0);
display.display();
if (Sharp_cm_int != Sharp_cm_previous)
{
if(sound)
{
digitalWrite(buzzer, HIGH);
delay(15);
digitalWrite(buzzer, LOW);
delay(30);
}
}
else
{
delay(45);
}
Sharp_cm_previous = Sharp_cm_int;
}
if (Sharp_cm < 10)
{
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(BLACK,WHITE);
display.setCursor(0,0);
display.print("1-Distance");
display.setTextColor(WHITE);
display.setCursor(95,0);
display.print(battery_level);
display.print("V");
display.setTextSize(2);
display.setCursor(0,10);
display.print("Too");
display.setCursor(0,30);
display.print("CLOSE");
display.display();
}
if (Sharp_cm > 80)
{
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(BLACK,WHITE);
display.setCursor(0,0);
display.print("1-Distance");
display.setTextColor(WHITE);
display.setCursor(95,0);
display.print(battery_level);
display.print("V");
display.setTextSize(2);
display.setCursor(0,10);
display.print("OUT");
display.setCursor(0,30);
display.print("OF");
display.setCursor(0,50);
display.print("RANGE");
display.display();
}
}
/////////////////////////////////////////////////////////////////////////////////
///////////////////////////////////////MODE 1////////////////////////////////////
if(mode == 1)
{
float VL53L0X_mm = sensor.readRangeSingleMillimeters() - 40; //40mm is the error
float VL53L0X_cm = VL53L0X_mm / 10;
float VL53L0X_inch = VL53L0X_cm * 0.393701;
int VL53L0X_mm_int = VL53L0X_mm;
if (VL53L0X_mm < 300)
{
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(BLACK,WHITE);
display.setCursor(0,0);
display.print("2-Distance");
display.setTextColor(WHITE);
display.setCursor(95,0);
display.print(battery_level);
display.print("V");
display.setTextSize(2);
display.setCursor(0,10);
display.print("mm: ");
display.print(VL53L0X_mm,0);
display.setCursor(0,30);
display.print("cm: ");
display.print(VL53L0X_cm,1);
display.setCursor(0,50);
display.print("in: ");
display.print(VL53L0X_inch,1);
display.display();
if (VL53L0X_mm_int != VL53L0X_mm_previous)
{
if(sound)
{
digitalWrite(buzzer, HIGH);
delay(15);
digitalWrite(buzzer, LOW);
delay(30);
}
}
else
{
delay(45);
}
VL53L0X_mm_previous = VL53L0X_mm_int;
}
else
{
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(BLACK,WHITE);
display.setCursor(0,0);
display.print("2-Distance");
display.setTextColor(WHITE);
display.setCursor(95,0);
display.print(battery_level);
display.print("V");
display.setTextSize(2);
display.setCursor(0,10);
display.print("OUT");
display.setCursor(0,30);
display.print("OF");
display.setCursor(0,50);
display.print("RANGE");
display.display();
}
}
/////////////////////////////////////////////////////////////////////////////////
///////////////////////////////////////MODE 2////////////////////////////////////
if(mode == 2)
{
float rotary_mm = (counter * (2.5* 3.1415 / 30)) * 10; //2.5 is the diameter of the wheel in cm, 30 is the steps / rotation of the encoder
float rotary_cm = rotary_mm / 10;
float rotary_inch = rotary_cm * 0.393701;
int rotary_mm_int = rotary_mm;
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(BLACK,WHITE);
display.setCursor(0,0);
display.print("3-Length");
display.setTextColor(WHITE);
display.setCursor(95,0);
display.print(battery_level);
display.print("V");
display.setTextSize(2);
display.setCursor(0,10);
display.print("mm: ");
display.print(rotary_mm,0);
display.setCursor(0,30);
display.print("cm: ");
display.print(rotary_cm,1);
display.setCursor(0,50);
display.print("in: ");
display.print(rotary_inch,1);
display.display();
}
/////////////////////////////////////////////////////////////////////////////////
///////////////////////////////////////MODE 3////////////////////////////////////
if(mode == 3)
{
print_time = print_time + 1;
timePrev = time; // the previous time is stored before the actual time read
time = millis(); // actual time read
elapsedTime = (time - timePrev) / 1000; //divide by 1000 in order to obtain seconds
//////////////////////////////////////Gyro read/////////////////////////////////////
Wire.beginTransmission(0x68); //begin, Send the slave adress (in this case 68)
Wire.write(0x43); //First adress of the Gyro data
Wire.endTransmission(false);
Wire.requestFrom(0x68,4,true); //We ask for just 4 registers
Gyr_rawX=Wire.read()<<8|Wire.read(); //Once again we shif and sum
Gyr_rawY=Wire.read()<<8|Wire.read();
/*Now in order to obtain the gyro data in degrees/seconds we have to divide first
the raw value by 32.8 because that's the value that the datasheet gives us for a 1000dps range*/
/*---X---*/
Gyr_rawX = (Gyr_rawX/32.8);
/*---Y---*/
Gyr_rawY = (Gyr_rawY/32.8);
/*Now we integrate the raw value in degrees per seconds in order to obtain the angle
* If you multiply degrees/seconds by seconds you obtain degrees */
/*---X---*/
Gyro_angle_x = Gyr_rawX*elapsedTime;
/*---X---*/
Gyro_angle_y = Gyr_rawY*elapsedTime;
//////////////////////////////////////Acc read/////////////////////////////////////
Wire.beginTransmission(0x68); //begin, Send the slave adress (in this case 68)
Wire.write(0x3B); //Ask for the 0x3B register- correspond to AcX
Wire.endTransmission(false); //keep the transmission and next
Wire.requestFrom(0x68,6,true); //We ask for next 6 registers starting withj the 3B
/*We have asked for the 0x3B register. The IMU will send a brust of register.
* The amount of register to read is specify in the requestFrom function.
* In this case we request 6 registers. Each value of acceleration is made out of
* two 8bits registers, low values and high values. For that we request the 6 of them
* and just make then sum of each pair. For that we shift to the left the high values
* register (<<) and make an or (|) operation to add the low values.
If we read the datasheet, for a range of+-8g, we have to divide the raw values by 4096*/
Acc_rawX=(Wire.read()<<8|Wire.read())/4096.0 ; //each value needs two registres
Acc_rawY=(Wire.read()<<8|Wire.read())/4096.0 ;
Acc_rawZ=(Wire.read()<<8|Wire.read())/4096.0 ;
/*Now in order to obtain the Acc angles we use euler formula with acceleration values
after that we substract the error value found before*/
/*---X---*/
Acc_angle_x = (atan((Acc_rawY)/sqrt(pow((Acc_rawX),2) + pow((Acc_rawZ),2)))*rad_to_deg);
/*---Y---*/
Acc_angle_y = (atan(-1*(Acc_rawX)/sqrt(pow((Acc_rawY),2) + pow((Acc_rawZ),2)))*rad_to_deg);
//////////////////////////////////////Total angle and filter/////////////////////////////////////
/*---X axis angle---*/
Total_angle_x = 0.98 *(Total_angle_x + Gyro_angle_x) + 0.02*Acc_angle_x;
/*---Y axis angle---*/
Total_angle_y = 0.98 *(Total_angle_y + Gyro_angle_y) + 0.02*Acc_angle_y;
float x_without_error = (Total_angle_x - angle_x_error)*-1;
float y_without_error = (Total_angle_y - angle_y_error);
if(print_time > 150)
{
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(BLACK,WHITE);
display.setCursor(0,0);
display.print("4-Level");
display.setTextColor(WHITE);
display.setCursor(95,0);
display.print(battery_level);
display.print("V");
display.setTextSize(2);
display.setCursor(0,25);
display.print("X: ");
display.print(y_without_error,1); //I print Y values for X because of how the IMU is palced inside the case
display.setCursor(0,45);
display.print("Y: ");
display.print(x_without_error,1); //I print X values for Y because of how the IMU is palced inside the case
display.display();
if( (-1 < x_without_error && x_without_error < 1) && (-1 < y_without_error && y_without_error < 1) && sound)
{
digitalWrite(buzzer,HIGH);
}
else
{
digitalWrite(buzzer,LOW);
}
}
}
/////////////////////////////////////////////////////////////////////////////////
///////////////////////////////////////MODE 4////////////////////////////////////
if(mode == 4)
{
print_time = print_time + 1;
timePrev = time; // the previous time is stored before the actual time read
time = millis(); // actual time read
elapsedTime = (time - timePrev) / 1000; //divide by 1000 in order to obtain seconds
//////////////////////////////////////Gyro read/////////////////////////////////////
if(!Z_error)
{
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(BLACK,WHITE);
display.setCursor(0,0);
display.print("5-Angle");
display.setTextColor(WHITE);
display.setCursor(95,0);
display.print(battery_level);
display.print("V");
display.setTextSize(2);
display.setCursor(20,30);
display.print("WAIT...");
display.display();
while(Z_loop < 20)
{
timePrev = time; // the previous time is stored before the actual time read
time = millis(); // actual time read
elapsedTime = (time - timePrev) / 1000; //divide by 1000 in order to obtain seconds
Wire.beginTransmission(0x68); //begin, Send the slave adress (in this case 68)
Wire.write(0x47); //First adress of the Z Gyro data
Wire.endTransmission(false);
Wire.requestFrom(0x68,2,true); //We ask for just 2 registers
Gyr_rawZ=Wire.read()<<8|Wire.read();
Gyr_rawZ = (Gyr_rawZ/32.8);
Gyro_angle_z = Gyr_rawZ*elapsedTime;
Gyr_rawZ_error = Gyr_rawZ_error + Gyro_angle_z;
Z_loop = Z_loop + 1;
delay(50);
}
Gyr_rawZ_error = Gyr_rawZ_error / 20;
Z_error = true;
}
Wire.beginTransmission(0x68); //begin, Send the slave adress (in this case 68)
Wire.write(0x47); //First adress of the Z Gyro data
Wire.endTransmission(false);
Wire.requestFrom(0x68,2,true); //We ask for just 2 registers
Gyr_rawZ=Wire.read()<<8|Wire.read();
/*Now in order to obtain the gyro data in degrees/seconds we have to divide first
the raw value by 32.8 because that is the value that the datasheet gives us for a 1000dps range*/
/*---Z---*/
Gyr_rawZ = (Gyr_rawZ/32.8);
/*Now we integrate the raw value in degrees per seconds in order to obtain the angle
* If you multiply degrees/seconds by seconds you obtain degrees */
Gyro_angle_z = Gyr_rawZ*elapsedTime;
Gyro_angle_z = Gyro_angle_z - Gyr_rawZ_error;
Total_angle_z = Total_angle_z + Gyro_angle_z;
if(print_time > 150)
{
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(BLACK,WHITE);
display.setCursor(0,0);
display.print("5-Angle");
display.setTextColor(WHITE);
display.setCursor(95,0);
display.print(battery_level);
display.print("V");
display.setTextSize(2);
display.setCursor(0,30);
display.print("X: ");
display.print(Total_angle_z,2); //I print Y values for X because of how the IMU is palced inside the case
display.display();
}
}
/////////////////////////////////////////////////////////////////////////////////
///////////////////////////////////////MODE 5////////////////////////////////////
if(mode == 5)
{
IR_enable = true;
int rpm = 60000000 / width; //values are in in us
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(BLACK,WHITE);
display.setCursor(0,0);
display.print("6-RPM");
display.setTextColor(WHITE);
display.setCursor(95,0);
display.print(battery_level);
display.print("V");
display.setTextSize(2);
display.setCursor(0,20);
display.print(" -RPM-");
display.setCursor(0,37);
display.print(rpm); //I print Y values for X because of how the IMU is palced inside the case
display.display();
}
/////////////////////////////////////////////////////////////////////////////////
}//end of void loop
ISR(PCINT0_vect){
if( (PINB & B00000001) && !data_state )
{
counter ++;
data_state = true;
delay(2);
}
if( !(PINB & B00000001) && data_state )
{
counter ++;
data_state = false;
delay(2);
}
if(IR_enable)
{
current_count = micros();
///////////////////////////////////////Channel 1
if(PINB & B00000100)
{
if(last_IR_state == 0){
last_IR_state = 1;
width = current_count - counter_1;
counter_1 = current_count;
}
}
else if(last_IR_state == 1)
{
last_IR_state = 0;
}
}
}//end if ISR







