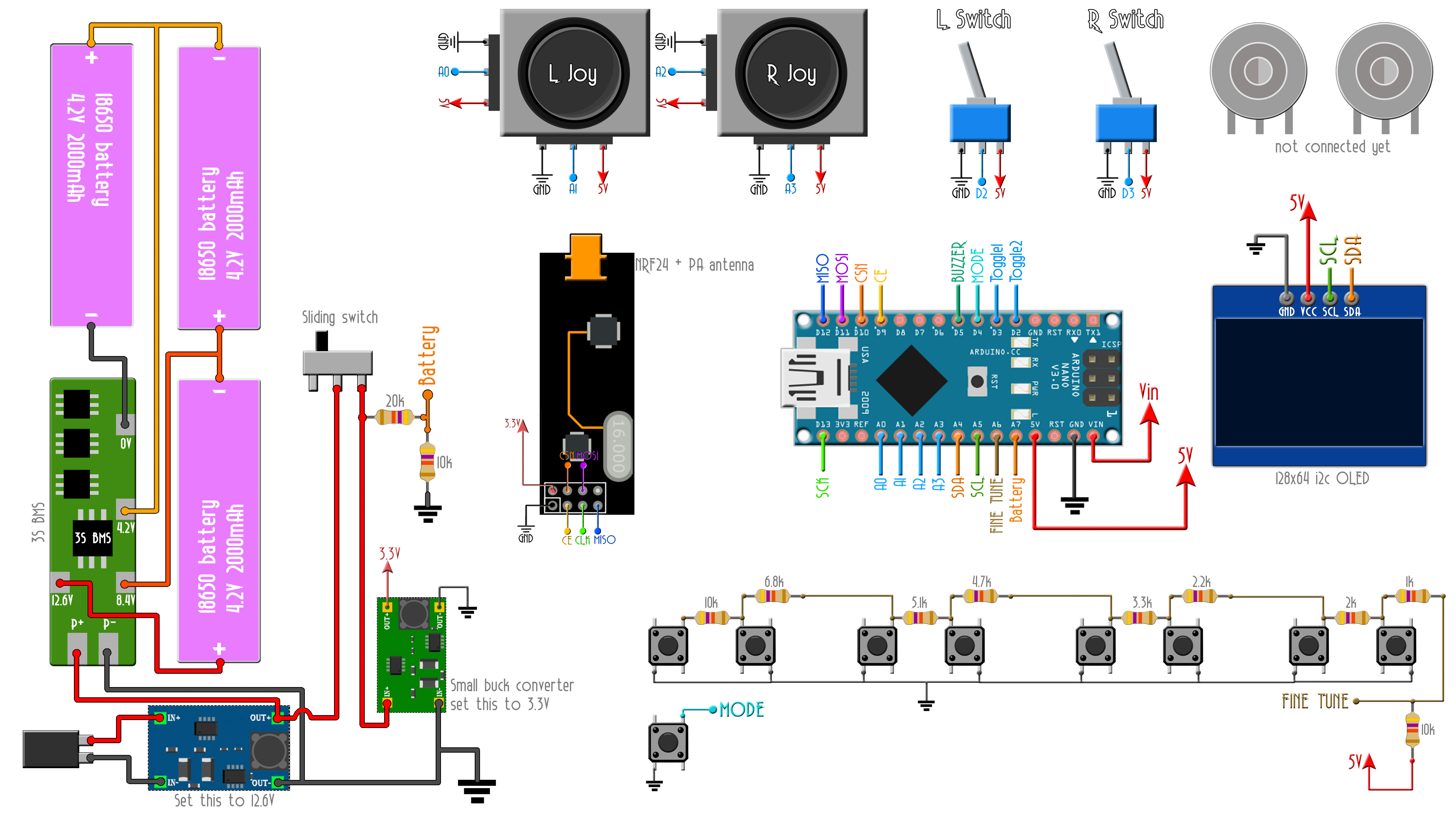
This is the code for the Arduino based radio controller project. Make sure you also install the needed library for the i2c OLED control and the NRF24 library. Download those from below. Install the library, compile and uplaod the code to the Arduino. Downlaod the zip file or copy+paste from below. Read all comments in the code!
/*A basic 6 channel transmitter using the nRF24L01 module.*/
/* Like, share and subscribe, ELECTRONOOBS */
/* http://www.youtube/c/electronoobs */
/* First we include the libraries. Download it from
my webpage if you donw have the NRF24 library */
//This are the bytes for the EN logo
static const unsigned char PROGMEM my_logo[] =
{/* 0X00,0X01,0X7C,0X00,0X40,0X00, */
0X00,0X00,0X00,0X00,0X00,0X01,0XFF,0XC0,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0XFF,0XE0,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0X7F,0XF0,0X00,0X18,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0X7F,0XF8,0X00,0X7C,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0X3C,0XFC,0X03,0XFC,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0X7C,0XF8,0X1F,0XFC,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0XFC,0XF0,0XFE,0X78,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0X7D,0XE0,0XFC,0X30,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0X7F,0XC0,0XFC,0X30,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0XFF,0XE0,0XF8,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0XFF,0XF8,0XF8,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0XF8,0XF9,0XF8,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0XF8,0XF9,0XF8,0X00,0X06,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X01,0XF0,0XF9,0XFE,0X00,0X3C,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X01,0XF9,0XF8,0XFF,0XFF,0XF8,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X01,0XF8,0X80,0XFF,0XFF,0XE0,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X7F,0XFF,0X80,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X7F,0XFC,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X20,0X20,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X18,0X00,0X0C,0X00,0X00,0X04,0X00,0X08,0X00,0X00,0X40,0X30,0X00,0X00,0X00,
0X01,0XF8,0X00,0XFC,0X00,0X0F,0XFF,0X80,0XFF,0X80,0X07,0XC1,0XF0,0X07,0X00,0X00,
0X07,0XF8,0X73,0XFC,0X03,0X1F,0XFF,0XC3,0XF3,0XC0,0X0F,0XC7,0XE0,0X7F,0X04,0XE0,
0X07,0X18,0XE3,0X8C,0X0F,0XBE,0X3D,0XC3,0XF9,0XE7,0X9F,0XC7,0XF1,0XFF,0X1F,0XE0,
0X0E,0X01,0XE7,0X00,0X7F,0X2E,0X39,0XC7,0XF1,0XF7,0X1F,0XCF,0XE1,0XE7,0XBF,0X00,
0X1F,0XC3,0XEF,0XE1,0XE3,0X0C,0X3B,0X86,0X73,0XFF,0X3B,0X8C,0XE1,0XC7,0XFF,0X00,
0X1F,0X83,0XCF,0XC1,0XE2,0X1C,0X3F,0X0E,0XF3,0XBF,0X33,0X9D,0XE3,0XFC,0X1F,0XC0,
0X1C,0X07,0XCE,0X01,0XE0,0X1C,0X3F,0XCE,0XE7,0XBF,0X77,0X9D,0XC3,0XFE,0X03,0XE0,
0X3C,0XE7,0X9E,0X71,0XC0,0X1C,0X79,0XCF,0XE7,0X1F,0X7F,0X1F,0XC7,0XCE,0X03,0XC0,
0X3F,0XE7,0X9F,0XF1,0XE0,0X3C,0X73,0XCF,0XE7,0X1F,0X7F,0X1F,0XC7,0XDE,0X7F,0XC0,
0XFF,0X0F,0X3F,0X81,0XFF,0XF8,0X7B,0XC7,0X8E,0X0E,0X3E,0X0F,0X0F,0XFF,0XFF,0X00,
0X00,0X0F,0X04,0X00,0XFF,0XE0,0X40,0X01,0X18,0X06,0X0C,0X02,0X0F,0XFF,0XFC,0X00,
0X00,0X0F,0X1C,0X00,0XFF,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X08,0X60,0X00,
0X00,0X1F,0XFC,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X3F,0XFC,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X80,0X00,0X00,0X00,0X00,0X00,
0X00,0X70,0X00,0X00,0X00,0X07,0XFC,0X00,0X00,0X01,0XC0,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X0F,0XAF,0X00,0X00,0X03,0XE0,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X38,0X03,0X80,0X00,0X03,0X60,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X78,0X41,0XC0,0X00,0X03,0XE0,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X63,0XFC,0X60,0X00,0X07,0X60,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0XC7,0XFE,0X70,0X00,0X3F,0XFE,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X01,0XCF,0XFF,0X30,0X00,0X7F,0X7F,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X01,0X9E,0XC7,0X10,0X00,0X6B,0XAB,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X01,0X9B,0X7B,0XB8,0X00,0X7E,0XFF,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X01,0XBD,0XBF,0X98,0X00,0X7F,0X7F,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X03,0X3F,0XAD,0X98,0X00,0X1F,0XFC,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X03,0X37,0XEF,0X98,0X00,0X03,0X60,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X03,0X3D,0XBB,0XD8,0X00,0X03,0XE0,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X03,0X3A,0XED,0X88,0X00,0X03,0X60,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X01,0X9F,0X6F,0X98,0X00,0X03,0XE0,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X01,0X9D,0XFB,0X98,0X79,0XE1,0XC0,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X01,0X9E,0XCF,0X30,0X79,0XC0,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0XCF,0X7E,0X30,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0XC7,0XFE,0X60,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X61,0XF0,0XE0,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X38,0X03,0XC0,0X7F,0XE7,0XFC,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X1E,0X07,0X80,0X7F,0XE7,0XFC,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X0F,0XFE,0X00,0X60,0X66,0X0C,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X03,0XF8,0X00,0X60,0X64,0X0C,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X7F,0XE7,0XF4,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X7F,0XE7,0XFC,0X00,0X00,0X00,0X00,0X00,
0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,0X00,
};
#include <SPI.h>
#include <nRF24L01.h> //Downlaod it here: https://www.electronoobs.com/eng_arduino_NRF24.php
#include <RF24.h>
#include <Wire.h>
#include <Adafruit_GFX.h> //Downlaod it here: https://www.electronoobs.com/eng_arduino_Adafruit_GFX.php
#include <Adafruit_SSD1306.h> //Downlaod it here: https://www.electronoobs.com/eng_arduino_Adafruit_SSD1306.php
#include <EEPROM.h>
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
//OLED setup
#define OLED_RESET 8
Adafruit_SSD1306 display(OLED_RESET);
#define NUMFLAKES 5
#define XPOS 0
#define YPOS 1
#define DELTAY 2
#if (SSD1306_LCDHEIGHT != 64)
#error("Height incorrect, please fix this in the Adafruit_SSD1306.h!");
#endif
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
/*Create a unique pipe out. The receiver has to
wear the same unique code*/
const uint64_t pipeOut = 0xE8E8F0F0E1LL; //IMPORTANT: The same as in the receiver!!!
RF24 radio(9, 10); // select CSN pin
// The sizeof this struct should not exceed 32 bytes
// This gives us up to 32 8 bits channals
struct MyData {
byte throttle;
byte yaw;
byte pitch;
byte roll;
byte AUX1;
byte AUX2;
};
MyData data;
//Inputs outputs
int battery_in = A7; //pin for analog in from the battery divider
int buttons_analog_in = A6; //Analog in from all the push buttons
int toggle_1 = 3;
int toggle_2 = 2;
int throttle_in = A0;
int yaw_in = A1;
int pitch_in = A2;
int roll_in = A3;
int mode_in = 4;
int buzzer = 5;
//Variables
float battery_level = 0;
int throttle_fine = 0;
int yaw_fine = 0;
int pitch_fine = 0;
int roll_fine = 0;
int button_read = 0;
int throttle_to_send = 0;
int yaw_to_send = 0;
int pitch_to_send = 0;
int roll_to_send = 0;
bool throttle_inverted = false;
bool yaw_inverted = true;
bool pitch_inverted = true;
bool roll_inverted = false;
bool yaw_decrease = false;
bool throttle_decrease = false;
bool pitch_decrease = false;
bool roll_decrease = false;
bool yaw_increase = false;
bool throttle_increase = false;
bool pitch_increase = false;
bool roll_increase = false;
bool mode = true;
bool mode_button_pressed = false;
bool sound = true;
int counter = 0;
int invert_counter = 0;
bool sound_changed = false;
void resetData()
{
//This are the start values of each channal
// Throttle is 0 in order to stop the motors
//127 is the middle value of the 10ADC.
data.throttle = 127;
data.yaw = 127;
data.pitch = 127;
data.roll = 127;
data.AUX1 = 0;
data.AUX2 = 0;
}
void setup()
{
if( EEPROM.read(1) != 55)
{
EEPROM.write(2, 127);
EEPROM.write(3, 127);
EEPROM.write(4, 127);
EEPROM.write(5, 127);
EEPROM.write(6, 0);
EEPROM.write(7, 1);
EEPROM.write(8, 1);
EEPROM.write(9, 0);
EEPROM.write(1, 55);
}
throttle_fine = EEPROM.read(2);
yaw_fine = EEPROM.read(3);
pitch_fine = EEPROM.read(4);
roll_fine = EEPROM.read(5);
throttle_inverted = EEPROM.read(6);
yaw_inverted = EEPROM.read(7);
pitch_inverted = EEPROM.read(8);
roll_inverted = EEPROM.read(9);
pinMode(buttons_analog_in, INPUT);
pinMode(mode_in, INPUT_PULLUP);
pinMode(buzzer, OUTPUT);
digitalWrite(buzzer,LOW);
display.begin(SSD1306_SWITCHCAPVCC, 0x3C); // initialize with the I2C addr 0x3C (for the 128x32)
delay(100);
display.clearDisplay();
display.setTextSize(1); //Set text size
display.setTextColor(WHITE); //Choose color
display.drawBitmap(0, 0, my_logo, 128, 64, 1);
digitalWrite(buzzer,HIGH);
delay(40);
digitalWrite(buzzer,LOW);
delay(40);
digitalWrite(buzzer,HIGH);
delay(40);
digitalWrite(buzzer,LOW);
display.display();
delay(2000);
//Start everything up
radio.begin();
radio.setAutoAck(false);
radio.setPALevel(RF24_PA_HIGH);
radio.setDataRate(RF24_250KBPS);
radio.openWritingPipe(pipeOut);
resetData();
}
/**************************************************/
int map_normal(int val, int lower, int middle, int upper, bool reverse)
{
val = constrain(val, lower, upper);
if ( val < middle )
val = map(val, lower, middle, 0, 128);
else
val = map(val, middle, upper, 128, 255);
return ( reverse ? 255 - val : val );
}
// Returns a corrected value for a joystick position that takes into account
// the values of the outer extents and the middle of the joystick range.
int map_exponential(int val, bool reverse)
{
val = constrain(val, 0, 1023);
float cube = ((pow((val - 512),3)/520200) + 258.012) / 2;
return ( reverse ? 255 - cube : cube );
}
void loop()
{
//battery read
battery_level = analogRead(battery_in) / 67.331; //////Voltage divider is 10k and 20K so 1/3
//Buttons read
button_read = analogRead(buttons_analog_in);
//Reset buttons
if(button_read > 820)
{
yaw_decrease = false;
throttle_decrease = false;
pitch_decrease = false;
roll_decrease = false;
yaw_increase = false;
throttle_increase = false;
pitch_increase = false;
roll_increase = false;
}
//////////////////////////////////////////////////////////////////////////////////////////
//YAW buttons
if(button_read < 260 && button_read > 200 && !yaw_decrease)
{
yaw_fine = yaw_fine + 1;
yaw_decrease = true;
EEPROM.write(3, yaw_fine);
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
if(button_read < 120 && button_read > 50 && !yaw_increase)
{
yaw_fine = yaw_fine - 1;
yaw_increase = true;
EEPROM.write(3, yaw_fine);
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
//////////////////////////////////////////////////////////////////////////////////////////
//THROTTLE buttons
if(button_read < 500 && button_read > 430 && !throttle_decrease)
{
throttle_fine = throttle_fine + 1;
throttle_decrease = true;
EEPROM.write(2, throttle_fine);
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
if(button_read < 380 && button_read > 320 && !throttle_increase)
{
throttle_fine = throttle_fine - 1;
throttle_increase = true;
EEPROM.write(2, throttle_fine);
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
//////////////////////////////////////////////////////////////////////////////////////////
//PITCH buttons
if(button_read < 610 && button_read > 550 && !pitch_decrease)
{
pitch_fine = pitch_fine + 1;
pitch_decrease = true;
EEPROM.write(4, pitch_fine);
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
if(button_read < 690 && button_read > 630 && !pitch_increase)
{
pitch_fine = pitch_fine - 1;
pitch_increase = true;
EEPROM.write(4, pitch_fine);
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
//////////////////////////////////////////////////////////////////////////////////////////
//ROLL buttons
if(button_read < 820 && button_read > 760 && !roll_decrease)
{
roll_fine = roll_fine + 1;
roll_decrease = true;
EEPROM.write(5, roll_fine);
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
if(button_read < 760 && button_read > 700 && !roll_increase)
{
roll_fine = roll_fine - 1;
roll_increase = true;
EEPROM.write(5, roll_fine);
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
//Mode select button
if(!digitalRead(mode_in) && !mode_button_pressed)
{
mode = !mode;
mode_button_pressed = true;
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
if(!digitalRead(mode_in) && !sound_changed)
{
if(counter > 20)
{
sound = !sound;
counter = 0;
sound_changed = true;
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
counter = counter + 1;
}
//Invert channels
//THROTTLE INVERT
if(button_read < 500 && button_read > 430)
{
if(invert_counter > 30)
{
throttle_inverted = !throttle_inverted;
invert_counter = 0;
EEPROM.write(6, throttle_inverted);
display.clearDisplay(); //Clear the display
display.setCursor(13,30); //Select where to print 124 x 64
display.print("Throttle inverted");
display.display();
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
delay(1500);
}
invert_counter = invert_counter + 1;
}
//YAW INVERT
if(button_read < 260 && button_read > 200)
{
if(invert_counter > 30)
{
yaw_inverted = !yaw_inverted;
invert_counter = 0;
EEPROM.write(7, yaw_inverted);
display.clearDisplay(); //Clear the display
display.setCursor(15,30); //Select where to print 124 x 64
display.print(" Yaw inverted");
display.display();
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
delay(1500);
}
invert_counter = invert_counter + 1;
}
//PITCH INVERT
if(button_read < 610 && button_read > 550)
{
if(invert_counter > 30)
{
pitch_inverted = !pitch_inverted;
invert_counter = 0;
EEPROM.write(8, pitch_inverted);
display.clearDisplay(); //Clear the display
display.setCursor(13,30); //Select where to print 124 x 64
display.print(" Pitch inverted");
display.display();
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
delay(1500);
}
invert_counter = invert_counter + 1;
}
//ROLL INVERT
if(button_read < 820 && button_read > 760)
{
if(invert_counter > 30)
{
roll_inverted = !roll_inverted;
invert_counter = 0;
EEPROM.write(9, roll_inverted);
display.clearDisplay(); //Clear the display
display.setCursor(15,30); //Select where to print 124 x 64
display.print(" Roll inverted");
display.display();
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
delay(1500);
}
invert_counter = invert_counter + 1;
}
if(digitalRead(mode_in) && mode_button_pressed)
{
mode_button_pressed= false;
sound_changed = false;
counter = 0;
invert_counter = 0;
}
//Mode select
if(!mode)
{
throttle_to_send = map_normal(analogRead(throttle_in), 0, 512, 1023, throttle_inverted);
yaw_to_send = map_normal(analogRead(yaw_in), 0, 512, 1023, yaw_inverted);
pitch_to_send = map_normal(analogRead(pitch_in), 0, 512, 1023, pitch_inverted);
roll_to_send = map_normal(analogRead(roll_in), 0, 512, 1023, roll_inverted);
}
if(mode)
{
throttle_to_send = map_exponential(analogRead(throttle_in), throttle_inverted);
yaw_to_send = map_exponential(analogRead(yaw_in), yaw_inverted);
pitch_to_send = map_exponential(analogRead(pitch_in), pitch_inverted);
roll_to_send = map_exponential(analogRead(roll_in), roll_inverted);
}
throttle_to_send = throttle_to_send + throttle_fine - 127;
yaw_to_send = yaw_to_send + yaw_fine - 127;
pitch_to_send = pitch_to_send + pitch_fine - 127;
roll_to_send = roll_to_send + roll_fine - 127;
data.throttle = constrain(throttle_to_send,0,255);
data.yaw = constrain(yaw_to_send,0,255);
data.pitch = constrain(pitch_to_send,0,255);
data.roll = constrain(roll_to_send,0,255);
data.AUX1 = digitalRead(toggle_1);
data.AUX2 = digitalRead(toggle_2);
radio.write(&data, sizeof(MyData));
display.clearDisplay(); //Clear the display
if(sound)
{
display.setCursor(0,0); //Select where to print 124 x 64
display.print("Sound ON");
}
if(!sound)
{
display.setCursor(0,0); //Select where to print 124 x 64
display.print("Sound OFF");
}
display.setCursor(90,0); //Select where to print 124 x 64
display.print(battery_level,1);
display.print("V");
display.setCursor(0,16); //Select where to print 124 x 64
display.print("T: ");
display.print(throttle_to_send);
display.print(" P: ");
display.print(pitch_to_send);
display.setCursor(0,29);
display.print("Y: ");
display.print(yaw_to_send);
display.print(" R: ");
display.print(roll_to_send);
//
display.setCursor(0,42);
display.print("SW1: ");
display.print(digitalRead(toggle_1));
display.print(" SW2: ");
display.print(digitalRead(toggle_2));
if(mode)
{
display.setCursor(0,56);
display.print("Mode: ");
display.print("Exponential");
}
if(!mode)
{
display.setCursor(0,56);
display.print("Mode: ");
display.print("Linear");
}
//
display.display();
}