




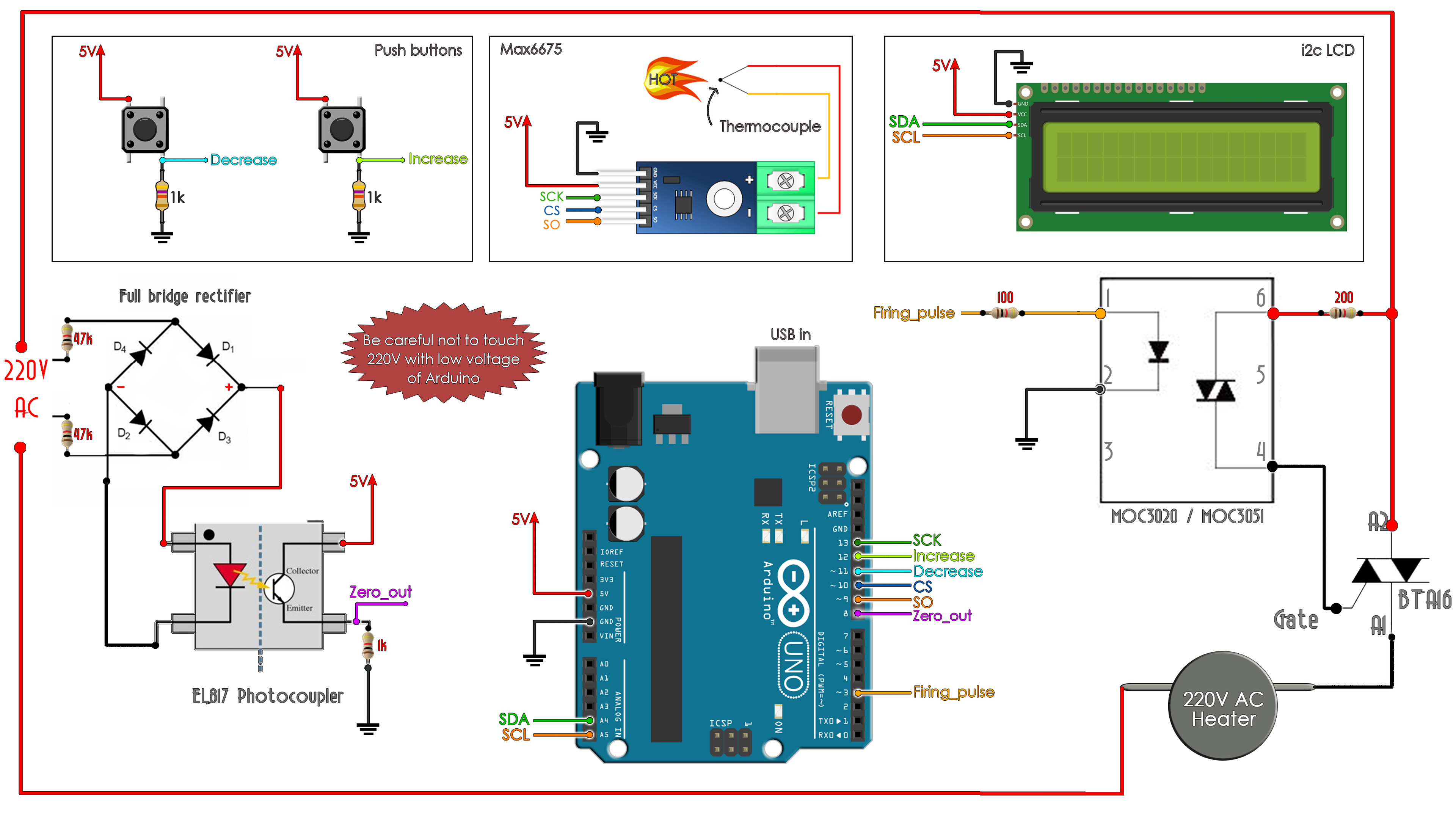
/* Max6675 Module ==> Arduino
* CS ==> D10
* SO ==> D9
* SCK ==> D13
* Vcc ==> Vcc (5v)
* Gnd ==> Gnd */
//LCD config
#include "max6675.h"
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27,20,4); //sometimes the adress is not 0x27. Change to 0x3f if it dosn't work.
/* i2c LCD Module ==> Arduino
* SCL ==> A5
* SDA ==> A4
* Vcc ==> Vcc (5v)
* Gnd ==> Gnd */
//Inputs and outputs
int firing_pin = 3;
int increase_pin = 11;
int decrease_pin = 12;
int zero_cross = 8;
int thermoDO = 9;
int thermoCS = 10;
int thermoCLK = 13;
//Start a MAX6675 communication with the selected pins
MAX6675 thermocouple(thermoCLK, thermoCS, thermoDO);
//Variables
int last_CH1_state = 0;
bool zero_cross_detected = false;
int firing_delay = 7400;
//////////////////////////////////////////////////////
int maximum_firing_delay = 7400;
/*Later in the code you will se that the maximum delay after the zero detection
* is 7400. Why? Well, we know that the 220V AC voltage has a frequency of around 50-60HZ so
* the period is between 20ms and 16ms, depending on the country. We control the firing
* delay each half period so each 10ms or 8 ms. To amke sure we wont pass thsoe 10ms, I've made tests
* and the 7400us or 7.4ms was a good value. Measure your frequency and chande that value later */
//////////////////////////////////////////////////////
unsigned long previousMillis = 0;
unsigned long currentMillis = 0;
int temp_read_Delay = 500;
int real_temperature = 0;
int setpoint = 100;
bool pressed_1 = false;
bool pressed_2 = false;
//PID variables
float PID_error = 0;
float previous_error = 0;
float elapsedTime, Time, timePrev;
int PID_value = 0;
//PID constants
int kp = 203; int ki= 7.2; int kd = 1.04;
int PID_p = 0; int PID_i = 0; int PID_d = 0;
void setup() {
//Define the pins
pinMode (firing_pin,OUTPUT);
pinMode (zero_cross,INPUT);
pinMode (increase_pin,INPUT);
pinMode (decrease_pin,INPUT);
PCICR |= (1 << PCIE0); //enable PCMSK0 scan
PCMSK0 |= (1 << PCINT0); //Set pin D8 (zero cross input) trigger an interrupt on state change.
PCMSK0 |= (1 << PCINT3); //Set pin D11 (increase button) trigger an interrupt on state change.
PCMSK0 |= (1 << PCINT4); //Set pin D12 (decrease button) trigger an interrupt on state change.
lcd.init(); //Start the LC communication
lcd.backlight(); //Turn on backlight for LCD
}
void loop() {
currentMillis = millis(); //Save the value of time before the loop
/* We create this if so we will read the temperature and change values each "temp_read_Delay"
* value. Change that value above iv you want. The MAX6675 read is slow. Tha will affect the
* PID control. I've tried reading the temp each 100ms but it didn't work. With 500ms worked ok.*/
if(currentMillis - previousMillis >= temp_read_Delay){
previousMillis += temp_read_Delay; //Increase the previous time for next loop
real_temperature = thermocouple.readCelsius(); //get the real temperature in Celsius degrees
PID_error = setpoint - real_temperature; //Calculate the pid ERROR
if(PID_error > 30) //integral constant will only affect errors below 30ºC
{PID_i = 0;}
PID_p = kp * PID_error; //Calculate the P value
PID_i = PID_i + (ki * PID_error); //Calculate the I value
timePrev = Time; // the previous time is stored before the actual time read
Time = millis(); // actual time read
elapsedTime = (Time - timePrev) / 1000;
PID_d = kd*((PID_error - previous_error)/elapsedTime); //Calculate the D value
PID_value = PID_p + PID_i + PID_d; //Calculate total PID value
//We define firing delay range between 0 and 7400. Read above why 7400!!!!!!!
if(PID_value < 0)
{ PID_value = 0; }
if(PID_value > 7400)
{ PID_value = 7400; }
//Printe the values on the LCD
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set: ");
lcd.setCursor(5,0);
lcd.print(setpoint);
lcd.setCursor(0,1);
lcd.print("Real temp: ");
lcd.setCursor(11,1);
lcd.print(real_temperature);
previous_error = PID_error; //Remember to store the previous error.
}
//If the zero cross interruption was detected we create the 100us firing pulse
if (zero_cross_detected)
{
delayMicroseconds(maximum_firing_delay - PID_value); //This delay controls the power
digitalWrite(firing_pin,HIGH);
delayMicroseconds(100);
digitalWrite(firing_pin,LOW);
zero_cross_detected = false;
}
}
//End of void loop
// |
// |
// |
// v
//See the interruption vector
//This is the interruption routine (pind D8(zero cross), D11(increase) and D12(decrease))
//----------------------------------------------
ISR(PCINT0_vect){
///////////////////////////////////////Input from optocoupler
if(PINB & B00000001){ //We make an AND with the state register, We verify if pin D8 is HIGH???
if(last_CH1_state == 0){ //If the last state was 0, then we have a state change...
zero_cross_detected = true; //We have detected a state change! We need both falling and rising edges
}
}
else if(last_CH1_state == 1){ //If pin 8 is LOW and the last state was HIGH then we have a state change
zero_cross_detected = true; //We haev detected a state change! We need both falling and rising edges.
last_CH1_state = 0; //Store the current state into the last state for the next loop
}
if(PINB & B00001000){ //We make an AND with the state register, We verify if pin D11 is HIGH???
if (!pressed_1)
{
setpoint = setpoint + 5; //Increase the temperature by 5. Change this with your value if you want.
delay(20);
pressed_1 = true;
}
}
else if (pressed_1)
{
pressed_1 = false;
}
if(PINB & B00010000){ //We make an AND with the state register, We verify if pin D12 is HIGH???
if (!pressed_2)
{
setpoint = setpoint - 5; //Decrease the temperature by 5. Change this with your value if you want.
delay(20);
pressed_2 = true;
}
}
else if (pressed_2)
{
pressed_2 = false;
}
}
//End of interruption vector for pins on port B: D8-D13


