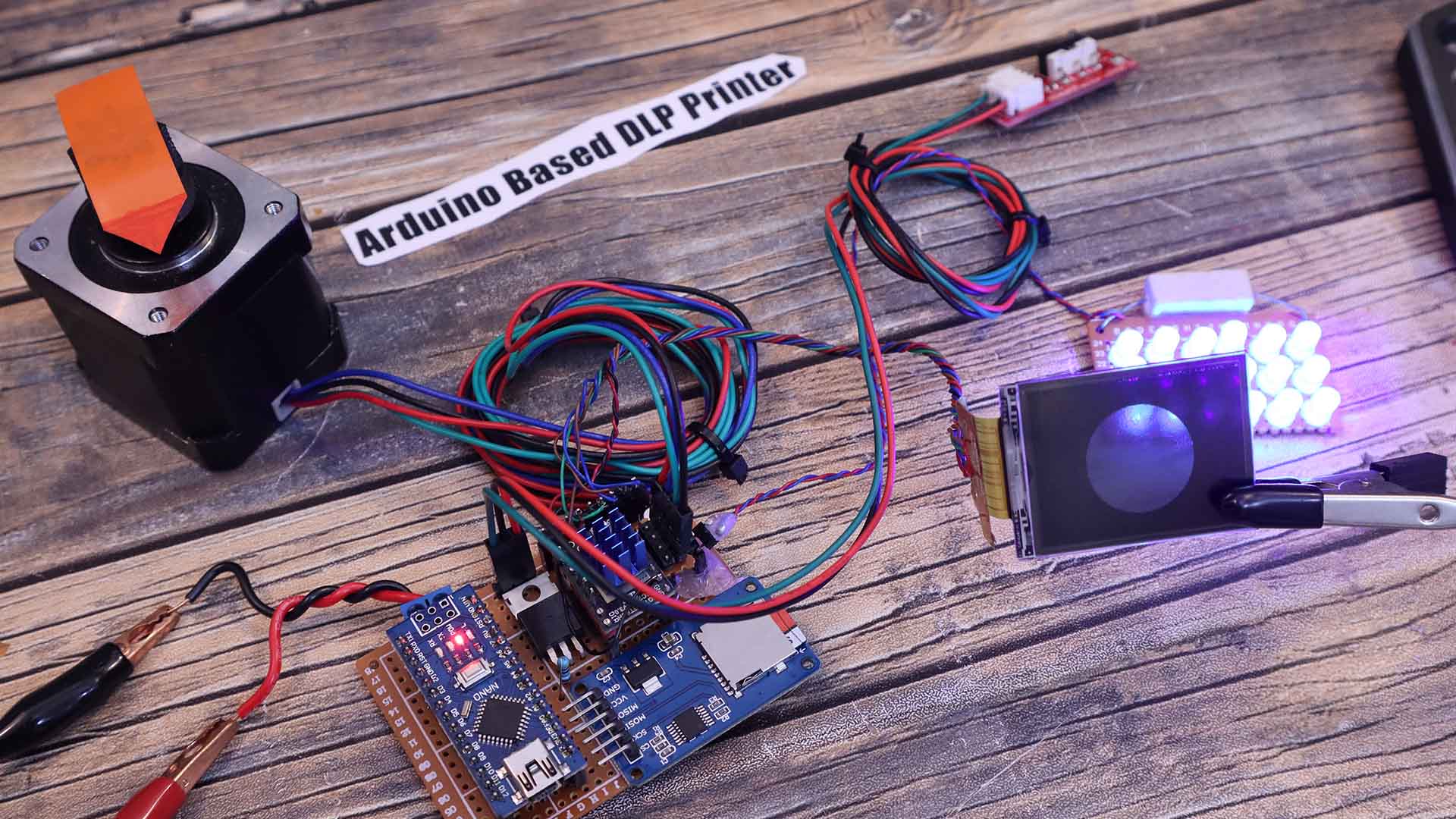
Make all the connections as in the previous part of the schematic. Download the code and libraries ferom below. To install the library, download the .zip file below, open Arduino IDE and go to Sketch, include library, add .zip library and open the .zip file that you have just downloaded. Now the ST7735 and Adafruit GFX library sould be installed. Open the main Arduino DLP firmware code. Compile and check for errors and uplaod it to the Arduino NANO. Now the printer is ready to go. When you power up the printer at 12V it will start the printing process automatically since it has no buttons. So make sure you already have prepared the bmp files on the SD card and see how to make that process in the next step.
#include <Adafruit_GFX.h> // Download: https://electronoobs.com/eng_arduino_Adafruit_GFX.php
#include <Adafruit_ST7735.h> // Download: https://electronoobs.com/eng_arduino_ST7735.php
#include <SPI.h> //Arduino IDE by default
#include <SD.h> //Arduino IDE by default
#define TFT_RST 9 // Reset line for TFT
#define TFT_CS 10 // Chip select line for TFT display
#define TFT_DC 8 // Data/command line for TFT
#define SD_CS 6 // Chip select line for SD card
//D11 -> MOSI SD + SDA TFT //Connect D11 to MOSI of SD card module but also to DIN of TFT
//D12 -> MISO SD //Connect D12 to MISO of SD card module
//D13 -> SCK SD + SCL TFT //SCK is connected to SCK of SD module and TFT display
#define end_stop 7 //Out pin from the end stop switch
#define mot_en 5 //Enable pin of the TMC2209 driver
#define mot_step 4 //Step pin of the TMC2209 driver
#define mot_dir 3 //Direction pin of the TMC2209 driver
#define LED 2 //Pin connected to the abse of the TIP31 transistor
// For 0.96", 1.44" and 1.8" TFT with ST7735 use
Adafruit_ST7735 tft = Adafruit_ST7735(TFT_CS, TFT_DC, TFT_RST);
//Variables
bool homming = false;
bool print_finished = false;
bool success = false;
bool UP = HIGH;
bool DOWN = LOW;
float steps_mm = 140;
float mm_step = 0.007142857;
float lift_print_slow_distance = 2;
float lift_print_distance = 20;
int homming_feedrate = 4000;
int lift_print_feedrate_slow = 10000;
int lift_print_feedrate = 5000;
float layer_height = 0.1;
int LED_on_time = 8000;
float max_height = 200;
float actual_height = 0;
bool first_print = false;
File root;
void setup(void) {
Serial.begin(9600);
while (!Serial) {
delay(10); // wait for serial console
}
pinMode(TFT_CS, OUTPUT);
digitalWrite(TFT_CS, HIGH);
pinMode(SD_CS, OUTPUT);
digitalWrite(SD_CS, HIGH);
pinMode(end_stop, INPUT);
pinMode(mot_en, OUTPUT);
digitalWrite(mot_en, HIGH); //Start with TMC2209 /disabled
pinMode(mot_step, OUTPUT);
pinMode(mot_dir, OUTPUT);
pinMode(LED, OUTPUT);
digitalWrite(LED, LOW); //Start with UV LEDs turned off
// Use this initializer if you're using a 1.8" TFT
tft.initR(INITR_BLACKTAB);
tft.fillScreen(ST77XX_BLACK);
Serial.print("Initializing SD card...");
if (!SD.begin(SD_CS)) {
Serial.println("failed!");
return;
}
Serial.println("OK!");
root = SD.open("/");
delay(100);
}
///////////////////////VOID LOOP////////////////////////////
////////////////////////////////////////////////////////////
void loop() {
if(!homming){
home_machine();
}
if(!print_finished){
print_next_bmp();
if(!print_finished){
turn_on_LED(LED_on_time);
lift_print();
lower_print();
}
}
if(print_finished && !success){
lift_finished_print();
success = true;
}
}//End void loop
////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////
void lower_print(){
int i = 0;
//Calculate the needed amount of steps
float lower_print_steps = ((lift_print_slow_distance + lift_print_distance - layer_height) * steps_mm)/2.0;
Serial.println("Lowering platform");
while(i < lower_print_steps){
digitalWrite(mot_en, LOW);
digitalWrite(mot_dir, DOWN);
digitalWrite(mot_step, HIGH);
actual_height = actual_height - mm_step;
delayMicroseconds(1);
digitalWrite(mot_step, LOW);
delayMicroseconds(lift_print_feedrate);
actual_height = actual_height - mm_step;
i++;
}
Serial.print("Actual height: "); Serial.println(actual_height);
delay(1000);
}
////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////
void lift_finished_print(){
Serial.println("Rising finished print");
while(actual_height < max_height){
digitalWrite(mot_en, LOW);
digitalWrite(mot_dir, UP);
digitalWrite(mot_step, HIGH);
actual_height = actual_height + mm_step;
delayMicroseconds(1);
digitalWrite(mot_step, LOW);
delayMicroseconds(lift_print_feedrate_slow);
actual_height = actual_height + mm_step;
}
Serial.print("Actual height: "); Serial.println(actual_height);
Serial.println("FINISHED!");
}
////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////
void lift_print(){
Serial.println("Rising platform");
int i = 0;
//Calculate the needed amount of steps
float lower_print_steps_slow = (lift_print_slow_distance * steps_mm)/2.0;
while (i < lower_print_steps_slow){
digitalWrite(mot_en, LOW);
digitalWrite(mot_dir, UP);
digitalWrite(mot_step, HIGH);
actual_height = actual_height + mm_step;
delayMicroseconds(1);
digitalWrite(mot_step, LOW);
delayMicroseconds(lift_print_feedrate_slow);
actual_height = actual_height + mm_step;
i++;
}
i = 0;
//Calculate the needed amount of steps
float lower_print_steps = (lift_print_distance * steps_mm)/2.0;
while (i < lower_print_steps){
digitalWrite(mot_en, LOW);
digitalWrite(mot_dir, UP);
digitalWrite(mot_step, HIGH);
actual_height = actual_height + mm_step;
delayMicroseconds(1);
digitalWrite(mot_step, LOW);
delayMicroseconds(lift_print_feedrate);
actual_height = actual_height + mm_step;
i++;
}
Serial.print("Actual height: "); Serial.println(actual_height);
delay(1000);
}
////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////
void turn_on_LED(int t){
Serial.print("LEDs turned ON for "); Serial.print(t); Serial.println(" ms");
digitalWrite(LED, HIGH);
delay(t);
digitalWrite(LED, LOW);
delay(100);
Serial.println("LEDs turned OFF");
tft.fillScreen(ST77XX_BLACK);
}
////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////
void print_next_bmp(){
if(!first_print){
File entry = root.openNextFile();
first_print = true;
}
File entry = root.openNextFile();
if(!entry){
//no more files
print_finished = true;
Serial.println("Print finished");
root.close();
return;
}
uint8_t nameSize = String(entry.name()).length(); //get file name size
String str1 = String(entry.name()).substring(nameSize - 4); //Save last 4 characters (file extension)
Serial.print("Drawing "); Serial.println(entry.name());
if(str1.equalsIgnoreCase(".bmp")){
bmpDraw(entry.name(), 0, 0);
}
entry.close();
delay(1000);
}
////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////
void home_machine(){
if(!homming){
Serial.println("Homming Machine");
while(digitalRead(end_stop)){
digitalWrite(mot_en, LOW);
digitalWrite(mot_dir, DOWN);
digitalWrite(mot_step, HIGH);
delayMicroseconds(1);
digitalWrite(mot_step, LOW);
delayMicroseconds(homming_feedrate);
}
homming = true;
actual_height = 0;
Serial.println("HOME");
delay(1000);
}
}
////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////
#define BUFFPIXEL 20
void bmpDraw(char *filename, uint8_t x, uint16_t y) {
File bmpFile;
int bmpWidth, bmpHeight; // W+H in pixels
uint8_t bmpDepth; // Bit depth (currently must be 24)
uint32_t bmpImageoffset; // Start of image data in file
uint32_t rowSize; // Not always = bmpWidth; may have padding
uint8_t sdbuffer[3*BUFFPIXEL]; // pixel buffer (R+G+B per pixel)
uint8_t buffidx = sizeof(sdbuffer); // Current position in sdbuffer
boolean goodBmp = false; // Set to true on valid header parse
boolean flip = true; // BMP is stored bottom-to-top
int w, h, row, col;
uint8_t r, g, b;
uint32_t pos = 0, startTime = millis();
if((x >= tft.width()) || (y >= tft.height())) return;
Serial.println();
Serial.print(F("Loading image '"));
Serial.print(filename);
Serial.println('\'');
// Open requested file on SD card
if ((bmpFile = SD.open(filename)) == NULL) {
Serial.print(F("File not found"));
return;
}
// Parse BMP header
if(read16(bmpFile) == 0x4D42) { // BMP signature
Serial.print(F("File size: ")); Serial.println(read32(bmpFile));
(void)read32(bmpFile); // Read & ignore creator bytes
bmpImageoffset = read32(bmpFile); // Start of image data
Serial.print(F("Image Offset: ")); Serial.println(bmpImageoffset, DEC);
// Read DIB header
Serial.print(F("Header size: ")); Serial.println(read32(bmpFile));
bmpWidth = read32(bmpFile);
bmpHeight = read32(bmpFile);
if(read16(bmpFile) == 1) { // # planes -- must be '1'
bmpDepth = read16(bmpFile); // bits per pixel
Serial.print(F("Bit Depth: ")); Serial.println(bmpDepth);
if((bmpDepth == 24) && (read32(bmpFile) == 0)) { // 0 = uncompressed
goodBmp = true; // Supported BMP format -- proceed!
Serial.print(F("Image size: "));
Serial.print(bmpWidth);
Serial.print('x');
Serial.println(bmpHeight);
// BMP rows are padded (if needed) to 4-byte boundary
rowSize = (bmpWidth * 3 + 3) & ~3;
// If bmpHeight is negative, image is in top-down order.
// This is not canon but has been observed in the wild.
if(bmpHeight < 0) {
bmpHeight = -bmpHeight;
flip = false;
}
// Crop area to be loaded
w = bmpWidth;
h = bmpHeight;
if((x+w-1) >= tft.width()) w = tft.width() - x;
if((y+h-1) >= tft.height()) h = tft.height() - y;
// Set TFT address window to clipped image bounds
tft.setAddrWindow(x, y, x+w-1, y+h-1);
for (row=0; row < h; row++) { // For each scanline...
// Seek to start of scan line. It might seem labor-
// intensive to be doing this on every line, but this
// method covers a lot of gritty details like cropping
// and scanline padding. Also, the seek only takes
// place if the file position actually needs to change
// (avoids a lot of cluster math in SD library).
if(flip) // Bitmap is stored bottom-to-top order (normal BMP)
pos = bmpImageoffset + (bmpHeight - 1 - row) * rowSize;
else // Bitmap is stored top-to-bottom
pos = bmpImageoffset + row * rowSize;
if(bmpFile.position() != pos) { // Need seek?
bmpFile.seek(pos);
buffidx = sizeof(sdbuffer); // Force buffer reload
}
for (col=0; col < w; col++) { // For each pixel...
// Time to read more pixel data?
if (buffidx >= sizeof(sdbuffer)) { // Indeed
bmpFile.read(sdbuffer, sizeof(sdbuffer));
buffidx = 0; // Set index to beginning
}
// Convert pixel from BMP to TFT format, push to display
b = sdbuffer[buffidx++];
g = sdbuffer[buffidx++];
r = sdbuffer[buffidx++];
tft.pushColor(tft.color565(r,g,b));
} // end pixel
} // end scanline
Serial.print(F("Loaded in "));
Serial.print(millis() - startTime);
Serial.println(" ms");
} // end goodBmp
}
}
bmpFile.close();
if(!goodBmp) Serial.println(F("BMP format not recognized."));
}
// These read 16- and 32-bit types from the SD card file.
// BMP data is stored little-endian, Arduino is little-endian too.
// May need to reverse subscript order if porting elsewhere.
uint16_t read16(File f) {
uint16_t result;
((uint8_t *)&result)[0] = f.read(); // LSB
((uint8_t *)&result)[1] = f.read(); // MSB
return result;
}
uint32_t read32(File f) {
uint32_t result;
((uint8_t *)&result)[0] = f.read(); // LSB
((uint8_t *)&result)[1] = f.read();
((uint8_t *)&result)[2] = f.read();
((uint8_t *)&result)[3] = f.read(); // MSB
return result;
}
void printDirectory(File dir, int numTabs) {
while (true) {
File entry = dir.openNextFile();
if (! entry) {
// no more files
break;
}
for (uint8_t i = 0; i < numTabs; i++) {
Serial.print('\t');
}
Serial.print(entry.name());
if (entry.isDirectory()) {
Serial.println("/");
printDirectory(entry, numTabs + 1);
} else {
// files have sizes, directories do not
Serial.print("\t\t");
Serial.println(entry.size(), DEC);
}
entry.close();
}
}