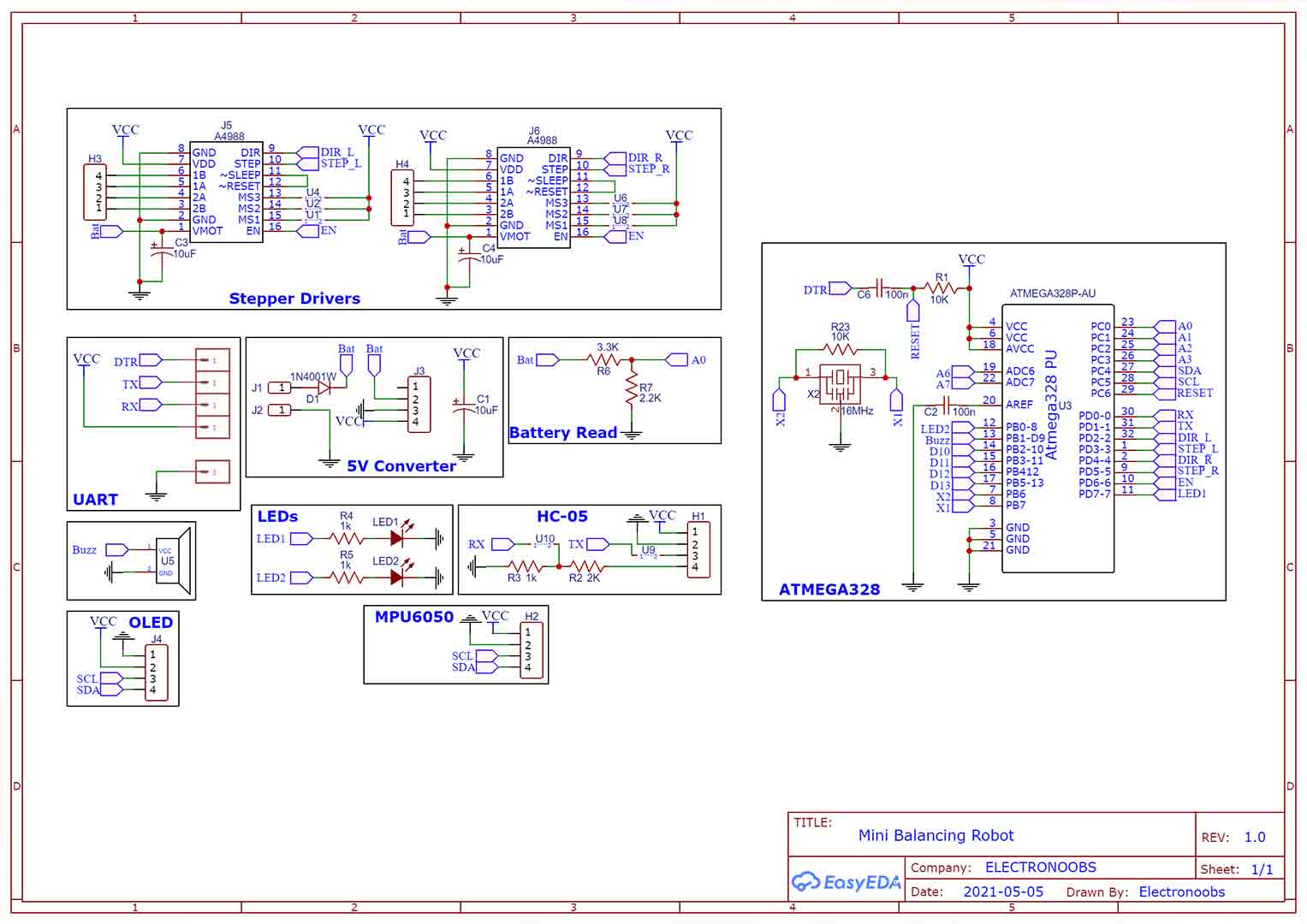
The schematic for the PCB is below. The battery, the main ON and Off switch and the motors are connected externally. Make sure you connect the NEMA 17 motor with conenctiosn in this order: 1B 2A 1A 2B. The rest of the connections are made on the PCB. The Buck converter is also external so make sure you connect in the right way. Make sure is fiexd at 5V.