This is the code for the Arduino based servo turret. Make sure you also install the needed library for i2c LCD screen module. Download that from below. Install the library, compile and uplaod the code to the Arduino. Downlaod the zip file or copy+paste from below. Read all comments in the code!
//Tutorial: https://www.electronoobs.com/eng_arduino_tut90.php
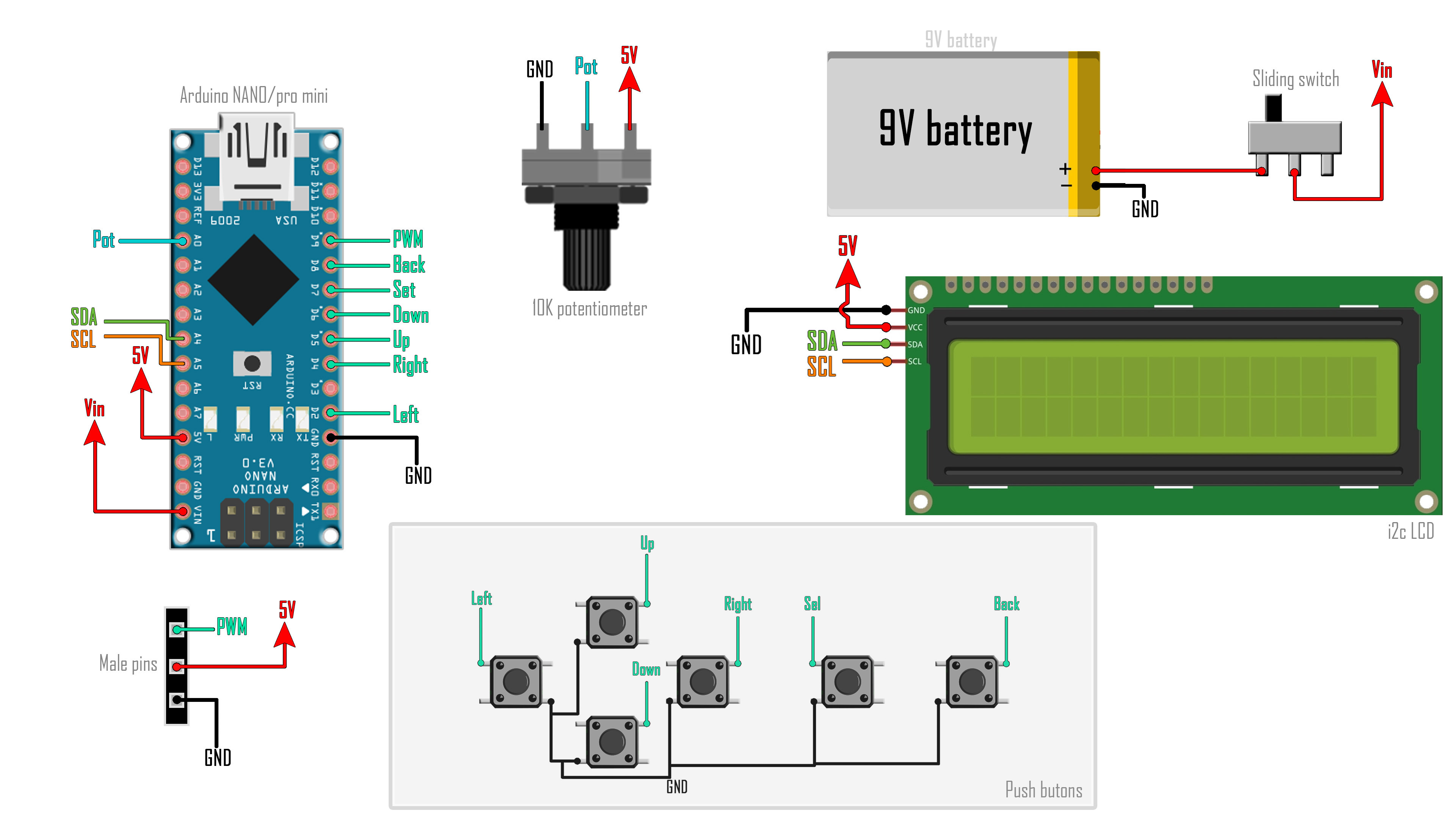
//Schematic: https://www.electronoobs.com/eng_arduino_tut90_sch1.php
//LCD config
#include <Wire.h>
#include <LiquidCrystal_I2C.h> //http://www.electronoobs.com/eng_arduino_liq_crystal.php
LiquidCrystal_I2C lcd(0x3f,20,4); //sometimes the LCD adress is not 0x3f. Change to 0x27 if it dosn't work.
//inputs/outputs
int left = 2;
int right = 4;
int up = 5;
int down = 6;
int sel = 7;
int back = 8;
int pot = A0;
int pwm = 9;
///Variables
uint8_t retarrow[8] = {
B00000,
B00100,
B00010,
B11111,
B00010,
B00100,
B00000};
int menu_level = 0;
int menu_0_level = 0;
int menu_1_level = 0;
int menu_4_level = 0;
int menu_8_level = 0;
int menu_11_level = 0;
bool up_state = true;
bool down_state = true;
bool left_state = true;
bool right_state = true;
bool sel_state = true;
bool back_state = true;
int loop_counter = 0;
unsigned long previousMillis = 0;
int deg_val = 0;
int width = 1000;
int width_min = 1000;
int width_max = 2000;
int frequency = 50;
int servo_freq = 20000;
int esc_freq = 20000;
int calib_min = 1000;
int calib_max = 2000;
int esc_width = 1000;
int esc_width_min = 1000;
int esc_width_max = 2000;
int esc_frequency = 50;
void setup() {
pinMode(left,INPUT_PULLUP);
pinMode(right,INPUT_PULLUP);
pinMode(up,INPUT_PULLUP);
pinMode(down,INPUT_PULLUP);
pinMode(sel,INPUT_PULLUP);
pinMode(back,INPUT_PULLUP);
pinMode(pot,INPUT);
pinMode(pwm, OUTPUT);
lcd.init(); //Init the LCD
lcd.backlight(); //Activate backl
lcd.createChar(1, retarrow);
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" Servo control");
lcd.setCursor(0,1);
lcd.print(" ESC control");
TCCR1A = 0;
TCCR1A = (1 <<COM1A1) | (1 << WGM11);
TCCR1B = 0;
TCCR1B = (1 << WGM13) | (1 << WGM12) | (1 << CS11);
ICR1 = 20000; //Freq= 50Hz
OCR1A = 0; //PWM->OFF pulse width = 0;
}
void loop() {
if(digitalRead(up))
{ up_state = true; }
if(digitalRead(down))
{ down_state = true; }
if(digitalRead(left))
{ left_state = true; }
if(digitalRead(right))
{ right_state = true; }
if(digitalRead(sel))
{ sel_state = true; }
if(digitalRead(back))
{ back_state = true; }
if(!(menu_level == 2 || menu_level == 3 || menu_level == 9 || menu_level == 10 || menu_level == 17 ))
{
OCR1A = 0; //PWM->OFF pulse width = 0;
//digitalWrite(9,LOW);
}
///////////////////////////////MENU 0////////////////////////////////
if(menu_level == 0 && !digitalRead(up) && up_state == true)
{
up_state = false;
menu_0_level = menu_0_level - 1;
if(menu_0_level < 0)
{
menu_0_level = 2;
}
if(menu_0_level == 0)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" Servo control");
lcd.setCursor(0,1);
lcd.print(" ESC control");
}
if(menu_0_level == 1)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" Servo control");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" ESC control");
}
if(menu_0_level == 2)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" ESC control");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" ESC calibrate");
}
}
if(menu_level == 0 && !digitalRead(down) && down_state == true)
{
down_state = false;
menu_0_level = menu_0_level + 1;
if(menu_0_level > 2)
{
menu_0_level = 0;
}
if(menu_0_level == 0)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" Servo control");
lcd.setCursor(0,1);
lcd.print(" ESC control");
}
if(menu_0_level == 1)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" Servo control");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" ESC control");
}
if(menu_0_level == 2)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" ESC control");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" ESC calibrate");
}
}
///////////////////////////////MENU 0////////////////////////////////
///////////////////////////////MENU CHANGE////////////////////////////////
/////////////////////////////////////////////////////////////////////////////////
if(!digitalRead(back) && back_state == true)
{
back_state = false;
if(menu_level == 1 || menu_level == 8 || menu_level == 15)
{
menu_level = 0;
menu_0_level = 0;
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" Servo control");
lcd.setCursor(0,1);
lcd.print(" ESC control");
}
if(menu_level == 2 || menu_level == 3 || menu_level == 4)
{
menu_level = 1;
menu_1_level = 0;
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" Servo pot");
lcd.setCursor(0,1);
lcd.print(" Servo fine");
}
if(menu_level == 1)
{
menu_level = 0;
menu_0_level = 0;
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" Servo control");
lcd.setCursor(0,1);
lcd.print(" ESC control");
}
if(menu_level == 5 || menu_level == 6 || menu_level == 7)
{
menu_level = 4;
menu_4_level = 0;
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" Min");
lcd.setCursor(0,1);
lcd.print(" Max");
}
if(menu_level == 9 || menu_level == 10 || menu_level == 11)
{
menu_level = 8;
menu_8_level = 0;
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" ESC pot");
lcd.setCursor(0,1);
lcd.print(" ESC fine");
}
if(menu_level == 12 || menu_level == 13 || menu_level == 14)
{
menu_level = 11;
menu_11_level = 0;
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" Min");
lcd.setCursor(0,1);
lcd.print(" Max");
}
}
/////////////////////////////////////////////////////////////////////////////////
/////////////////////////////////////////////////////////////////////////////////
if(menu_level == 0 && menu_0_level == 0 && !digitalRead(sel) && sel_state == true)
{
sel_state = false;
menu_level = 1;
ICR1 = servo_freq;
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" Servo pot");
lcd.setCursor(0,1);
lcd.print(" Servo fine");
}
if(menu_level == 0 && menu_0_level == 1 && !digitalRead(sel) && sel_state == true)
{
sel_state = false;
menu_level = 8;
ICR1 = esc_freq;
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" ESC pot");
lcd.setCursor(0,1);
lcd.print(" ESC fine");
}
if(menu_level == 0 && menu_0_level == 2 && !digitalRead(sel) && sel_state == true)
{
sel_state = false;
menu_level = 15;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set min value:");
lcd.setCursor(0,1);
lcd.print(calib_min);
}
/////////////////////////////////////////////////////////////////////////////////
/////////////////////////////////////////////////////////////////////////////////
if(menu_level == 1 && menu_1_level == 0 && !digitalRead(sel) && sel_state == true)
{
sel_state = false;
previousMillis = millis();
menu_level = 2;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Deg ");
lcd.print(deg_val);
}
if(menu_level == 1 && menu_1_level == 1 && !digitalRead(sel) && sel_state == true)
{
sel_state = false;
previousMillis = millis();
menu_level = 3;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Deg ");
lcd.print(deg_val);
}
if(menu_level == 1 && menu_1_level == 2 && !digitalRead(sel) && sel_state == true)
{
sel_state = false;
menu_level = 4;
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" Min");
lcd.setCursor(0,1);
lcd.print(" Max");
}
/////////////////////////////////////////////////////////////////////////////////
/////////////////////////////////////////////////////////////////////////////////
if(menu_level == 4 && menu_4_level == 0 && !digitalRead(sel) && sel_state == true)
{
sel_state = false;
menu_level = 5;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set min:");
lcd.setCursor(0,1);
lcd.print(width_min);
}
if(menu_level == 4 && menu_4_level == 1 && !digitalRead(sel) && sel_state == true)
{
sel_state = false;
menu_level = 6;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set max:");
lcd.setCursor(0,1);
lcd.print(width_max);
}
if(menu_level == 4 && menu_4_level == 2 && !digitalRead(sel) && sel_state == true)
{
sel_state = false;
menu_level = 7;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set frequency:");
lcd.setCursor(0,1);
lcd.print(frequency);
}
/////////////////////////////////////////////////////////////////////////////////
/////////////////////////////////////////////////////////////////////////////////
if(menu_level == 8 && menu_8_level == 0 && !digitalRead(sel) && sel_state == true)
{
sel_state = false;
previousMillis = millis();
menu_level = 9;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("us: ");
lcd.print(esc_width);
}
if(menu_level == 8 && menu_8_level == 1 && !digitalRead(sel) && sel_state == true)
{
sel_state = false;
menu_level = 10;
previousMillis = millis();
esc_width = esc_width_min;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("us: ");
lcd.print(esc_width);
}
if(menu_level == 8 && menu_8_level == 2 && !digitalRead(sel) && sel_state == true)
{
sel_state = false;
menu_level = 11;
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" Min");
lcd.setCursor(0,1);
lcd.print(" Max");
}
/////////////////////////////////////////////////////////////////////////////////
/////////////////////////////////////////////////////////////////////////////////
if(menu_level == 11 && menu_11_level == 0 && !digitalRead(sel) && sel_state == true)
{
sel_state = false;
menu_level = 12;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set min:");
lcd.setCursor(0,1);
lcd.print(width_min);
}
if(menu_level == 11 && menu_11_level == 1 && !digitalRead(sel) && sel_state == true)
{
sel_state = false;
menu_level = 13;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set max:");
lcd.setCursor(0,1);
lcd.print(width_max);
}
if(menu_level == 11 && menu_11_level == 2 && !digitalRead(sel) && sel_state == true)
{
sel_state = false;
menu_level = 14;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set frequency:");
lcd.setCursor(0,1);
lcd.print(frequency);
}
/////////////////////////////////////////////////////////////////////////////////
///////////////////////////////MENU CHANGE////////////////////////////////
///////////////////////////////MENU 1////////////////////////////////
if(menu_level == 1 && !digitalRead(up) && up_state == true)
{
up_state = false;
menu_1_level = menu_1_level - 1;
if(menu_1_level < 0)
{
menu_1_level = 2;
}
if(menu_1_level == 0)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" Servo pot");
lcd.setCursor(0,1);
lcd.print(" Servo fine");
}
if(menu_1_level == 1)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" Servo pot");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" Servo fine");
}
if(menu_1_level == 2)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" Servo fine");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" Servo config");
}
}
if(menu_level == 1 && !digitalRead(down) && down_state == true)
{
OCR1A = 0; //PWM->OFF pulse width = 0;
down_state = false;
menu_1_level = menu_1_level + 1;
if(menu_1_level > 2)
{
menu_1_level = 0;
}
if(menu_1_level == 0)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" Servo pot");
lcd.setCursor(0,1);
lcd.print(" Servo fine");
}
if(menu_1_level == 1)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" Servo pot");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" Servo fine");
}
if(menu_1_level == 2)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" Servo fine");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" Servo config");
}
}
///////////////////////////////MENU 1////////////////////////////////
///////////////////////////////MENU 2////////////////////////////////
if(menu_level == 2)
{
width = map(analogRead(pot),0,1024,width_min,width_max);
deg_val = map(width,width_min,width_max,0,181);
OCR1A = width;
unsigned long currentMillis = millis();
if(currentMillis - previousMillis >= 100)
{
previousMillis += 100;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Deg: ");
lcd.print(deg_val);
}
}
///////////////////////////////MENU 2////////////////////////////////
///////////////////////////////MENU 3////////////////////////////////
if(menu_level == 3)
{
if(!digitalRead(left) && left_state==true)
{
deg_val = deg_val - 1;
left_state = false;
}
if(!digitalRead(right) && right_state==true)
{
deg_val = deg_val + 1;
right_state = false;
}
if(deg_val > 180) deg_val = 180;
if(deg_val < 0) deg_val = 0;
width = map(deg_val, 0, 190,width_min, width_max);
OCR1A = width;
unsigned long currentMillis = millis();
if(currentMillis - previousMillis >= 100)
{
previousMillis += 100;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Deg: ");
lcd.print(deg_val);
}
}
///////////////////////////////MENU 3////////////////////////////////
///////////////////////////////MENU 4////////////////////////////////
if(menu_level == 4 && !digitalRead(up) && up_state == true)
{
OCR1A = 0; //PWM->OFF pulse width = 0;
up_state = false;
menu_4_level = menu_4_level - 1;
if(menu_4_level < 0)
{
menu_4_level = 2;
}
if(menu_4_level == 0)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" Min");
lcd.setCursor(0,1);
lcd.print(" Max");
}
if(menu_4_level == 1)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" Min");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" Max");
}
if(menu_4_level == 2)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" Max");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" Frequency");
}
}
if(menu_level == 4 && !digitalRead(down) && down_state == true)
{
OCR1A = 0; //PWM->OFF pulse width = 0;
down_state = false;
menu_4_level = menu_4_level + 1;
if(menu_4_level > 2)
{
menu_4_level = 0;
}
if(menu_4_level == 0)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" Min");
lcd.setCursor(0,1);
lcd.print(" Max");
}
if(menu_4_level == 1)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" Min");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" Max");
}
if(menu_4_level == 2)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" Max");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" Frequency");
}
}
///////////////////////////////MENU 4////////////////////////////////
///////////////////////////////MENU 5////////////////////////////////
if(menu_level == 5 && !digitalRead(left) && left_state == true)
{
left_state = false;
width_min = width_min - 5;
if(width_min < 100)
{
width_min = 100;
}
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set min:");
lcd.setCursor(0,1);
lcd.print(width_min);
}
if(menu_level == 5 && !digitalRead(right) && right_state == true)
{
right_state = false;
width_min = width_min + 5;
if(width_min > width_max)
{
width_min = width_max;
}
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set min:");
lcd.setCursor(0,1);
lcd.print(width_min);
}
///////////////////////////////MENU 5////////////////////////////////
///////////////////////////////MENU 6////////////////////////////////
if(menu_level == 6 && !digitalRead(left) && left_state == true)
{
left_state = false;
width_max= width_max - 5;
if(width_max < width_min)
{
width_max = width_min;
}
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set max:");
lcd.setCursor(0,1);
lcd.print(width_max);
}
if(menu_level == 6 && !digitalRead(right) && right_state == true)
{
right_state = false;
width_max = width_max + 5;
if(width_max > 4000)
{
width_max = 40000;
}
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set max:");
lcd.setCursor(0,1);
lcd.print(width_max);
}
///////////////////////////////MENU 5////////////////////////////////
///////////////////////////////MENU 7////////////////////////////////
if(menu_level == 7 && !digitalRead(left) && left_state == true)
{
left_state = false;
frequency= frequency - 1;
if(frequency < 10)
{
frequency = 10;
}
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set frequency:");
lcd.setCursor(0,1);
lcd.print(frequency);
servo_freq = 16000000/(frequency*16);
}
if(menu_level == 7 && !digitalRead(right) && right_state == true)
{
right_state = false;
frequency = frequency + 1;
if(frequency > 100)
{
frequency = 100;
}
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set frequency:");;
lcd.setCursor(0,1);
lcd.print(frequency);
servo_freq = 16000000/(frequency*16);
}
///////////////////////////////MENU 7////////////////////////////////
///////////////////////////////MENU 8////////////////////////////////
if(menu_level == 8 && !digitalRead(up) && up_state == true)
{
up_state = false;
menu_8_level = menu_8_level - 1;
if(menu_8_level < 0)
{
menu_8_level = 2;
}
if(menu_8_level == 0)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" ESC pot");
lcd.setCursor(0,1);
lcd.print(" ESC fine");
}
if(menu_8_level == 1)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" ESC pot");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" ESC fine");
}
if(menu_8_level == 2)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" ESC fine");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" ESC config");
}
}
if(menu_level == 8 && !digitalRead(down) && down_state == true)
{
down_state = false;
menu_8_level = menu_8_level + 1;
if(menu_8_level > 2)
{
menu_8_level = 0;
}
if(menu_8_level == 0)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" ESC pot");
lcd.setCursor(0,1);
lcd.print(" ESC fine");
}
if(menu_8_level == 1)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" ESC pot");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" ESC fine");
}
if(menu_8_level == 2)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" ESC fine");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" ESC config");
}
}
///////////////////////////////MENU 8////////////////////////////////
///////////////////////////////MENU 9////////////////////////////////
if(menu_level == 9)
{
esc_width = map(analogRead(pot),0,1024,esc_width_min,esc_width_max);
OCR1A = esc_width;
unsigned long currentMillis = millis();
if(currentMillis - previousMillis >= 100)
{
previousMillis += 100;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("us: ");
lcd.print(esc_width);
}
}
///////////////////////////////MENU 9////////////////////////////////
///////////////////////////////MENU 10////////////////////////////////
if(menu_level == 10)
{
if(!digitalRead(left))
{
esc_width = esc_width - 1;
left_state = false;
delay(10);
}
if(!digitalRead(right))
{
esc_width = esc_width + 1;
right_state = false;
delay(10);
}
if(esc_width > esc_width_max) esc_width = esc_width_max;
if(esc_width < esc_width_min) esc_width = esc_width_min;
OCR1A = esc_width;
unsigned long currentMillis = millis();
if(currentMillis - previousMillis >= 100)
{
previousMillis += 100;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("us: ");
lcd.print(esc_width);
}
}
///////////////////////////////MENU 10////////////////////////////////
///////////////////////////////MENU 11////////////////////////////////
if(menu_level == 11 && !digitalRead(up) && up_state == true)
{
up_state = false;
menu_11_level = menu_11_level - 1;
if(menu_11_level < 0)
{
menu_11_level = 2;
}
if(menu_11_level == 0)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" Min");
lcd.setCursor(0,1);
lcd.print(" Max");
}
if(menu_11_level == 1)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" Min");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" Max");
}
if(menu_11_level == 2)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" Max");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" Frequency");
}
}
if(menu_level == 11 && !digitalRead(down) && down_state == true)
{
down_state = false;
menu_11_level = menu_11_level + 1;
if(menu_11_level > 2)
{
menu_11_level = 0;
}
if(menu_11_level == 0)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" Min");
lcd.setCursor(0,1);
lcd.print(" Max");
}
if(menu_11_level == 1)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" Min");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" Max");
}
if(menu_11_level == 2)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" Max");
lcd.setCursor(0,1);
lcd.write(1);
lcd.print(" Frequency");
}
}
///////////////////////////////MENU 11////////////////////////////////
///////////////////////////////MENU 12////////////////////////////////
if(menu_level == 12 && !digitalRead(left) && left_state == true)
{
left_state = false;
esc_width_min = esc_width_min - 5;
if(esc_width_min < 100)
{
esc_width_min = 100;
}
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set min:");
lcd.setCursor(0,1);
lcd.print(esc_width_min);
}
if(menu_level == 12 && !digitalRead(right) && right_state == true)
{
right_state = false;
esc_width_min = esc_width_min + 5;
if(esc_width_min > esc_width_max)
{
esc_width_min = esc_width_max;
}
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set min:");
lcd.setCursor(0,1);
lcd.print(esc_width_min);
}
///////////////////////////////MENU 12////////////////////////////////
///////////////////////////////MENU 13////////////////////////////////
if(menu_level == 13 && !digitalRead(left) && left_state == true)
{
left_state = false;
esc_width_max= esc_width_max - 5;
if(esc_width_max < esc_width_min)
{
esc_width_max = esc_width_min;
}
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set max:");
lcd.setCursor(0,1);
lcd.print(esc_width_max);
}
if(menu_level == 13 && !digitalRead(right) && right_state == true)
{
right_state = false;
esc_width_max = esc_width_max + 5;
if(esc_width_max > 4000)
{
esc_width_max = 40000;
}
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set max:");
lcd.setCursor(0,1);
lcd.print(esc_width_max);
}
///////////////////////////////MENU 13////////////////////////////////
///////////////////////////////MENU 14////////////////////////////////
if(menu_level == 14 && !digitalRead(left) && left_state == true)
{
left_state = false;
frequency= frequency - 1;
if(frequency < 10)
{
frequency = 10;
}
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set frequency:");
lcd.setCursor(0,1);
lcd.print(frequency);
esc_freq = 16000000/(frequency*16);
}
if(menu_level == 14 && !digitalRead(right) && right_state == true)
{
right_state = false;
frequency = frequency + 1;
if(frequency > 100)
{
frequency = 100;
}
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set frequency:");;
lcd.setCursor(0,1);
lcd.print(frequency);
esc_freq = 16000000/(frequency*16);
}
///////////////////////////////MENU 14////////////////////////////////
///////////////////////////////MENU 15////////////////////////////////
if(menu_level == 15 && !digitalRead(left) && left_state == true)
{
left_state = false;
calib_min= calib_min - 5;
if(calib_min < 100)
{
calib_min = 100;
}
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set min value:");
lcd.setCursor(0,1);
lcd.print(calib_min);
}
if(menu_level == 15 && !digitalRead(right) && right_state == true)
{
right_state = false;
calib_min= calib_min + 5;
if(calib_min > calib_max)
{
calib_min = calib_max;
}
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set min value:");
lcd.setCursor(0,1);
lcd.print(calib_min);
}
if(menu_level == 15 && !digitalRead(sel) && sel_state == true)
{
sel_state = false;
menu_level = 16;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set max value:");
lcd.setCursor(0,1);
lcd.print(calib_max);
}
if(menu_level == 16 && !digitalRead(left) && left_state == true)
{
left_state = false;
calib_max= calib_max - 5;
if(calib_max < calib_min)
{
calib_max = calib_min;
}
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set max value:");
lcd.setCursor(0,1);
lcd.print(calib_max);
}
if(menu_level == 16 && !digitalRead(right) && right_state == true)
{
right_state = false;
calib_max= calib_max + 5;
if(calib_max > 4000)
{
calib_max = 4000;
}
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Set max value:");
lcd.setCursor(0,1);
lcd.print(calib_max);
}
if(menu_level == 16 && !digitalRead(sel) && sel_state == true)
{
sel_state = false;
menu_level = 17;
OCR1A = calib_max;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Connect battery");
lcd.setCursor(0,1);
lcd.print("And press select");
}
if(menu_level == 17 && !digitalRead(sel) && sel_state == true)
{
sel_state = false;
OCR1A = calib_min;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Calibrating");
delay(1000);
lcd.clear();
lcd.setCursor(0,0);
lcd.print("ESC configured");
lcd.setCursor(0,1);
lcd.print("after beep");
delay(2000);
menu_level = 0;
menu_0_level = 0;
lcd.setCursor(0,0);
lcd.write(1);
lcd.print(" Servo control");
lcd.setCursor(0,1);
lcd.print(" ESC control");
}
///////////////////////////////MENU 15,16,17////////////////////////////////
}//end void loop