
Ok, the code is not that difficult. Downlaod it from below. You will also need the library for the VL53L0X sensor. So downlaod that from the link below as well adn install it to the Arduino. In the cose we make steps, make a measurement and print the angle adn distance to the serial communication and then we make more steps and so on till we get to 360 degrees. Then we use processing to read and plot the distance.
/* Lidar code by ELECTRONOOBS
* Get distance and angle and send via serial port RX, TX
* Tutorial: https://electronoobs.com/eng_arduino_tut110.php
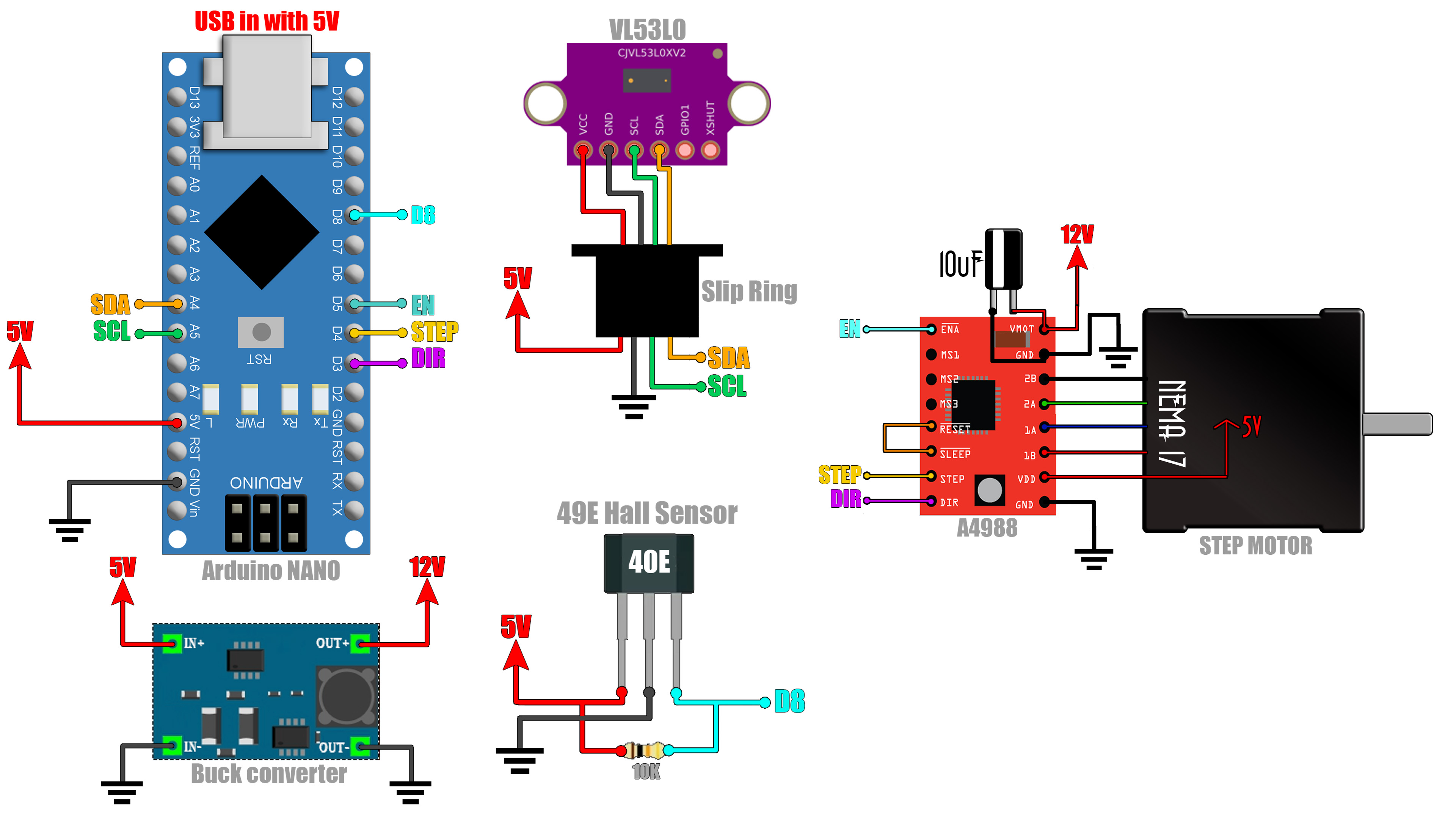
* Schematic: https://electronoobs.com/eng_arduino_tut110_sch1.php
* Code: https://electronoobs.com/eng_arduino_tut110_code1.php
* YouTube channel: https://www.youtube.com/channel/UCjiVhIvGmRZixSzupD0sS9Q
*/
//Libraries
#include <Wire.h>
#include <VL53L0X.h> //Downlaod it here: https://www.electronoobs.com/eng_arduino_Adafruit_VL53L0X.php
VL53L0X sensor; //Define our sensor
//If you uncomment any of lines below you activate that mode
#define LONG_RANGE
#define HIGH_SPEED
//#define HIGH_ACCURACY
//Outputs/inputs
#define dirPin 3 //Pin for direction of the stepper driver
#define stepPin 4 //Pin for steps of the stepper driver
#define Enable 5 //Pin for enable the stepper driver
//Variables
int Value = 1200; //Delay value between steps
float angle = 0; //Start angle
/* ----------------Step angle calculation----------------
* We need 1.5 rotations for 360º. (pully ratio 1.5 : 1)
* Each 200 steps the motor will make a rotation.
* We move 2 steps and the we make a measurement.
* This equals to 360º/(200steps * 1.5) * 2 = 2.4angle/loop ->
----------------Step angle calculation----------------*/
float angle_step = 2.4; //So place that value here
float maxdist = 400; //I've set the maximum distance around the sensor to only 400mm. Change to any other value.
bool loop_starts = false;
byte last_PIN_state;
void setup() {
// Declare pins as output:
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
pinMode(Enable, OUTPUT);
digitalWrite(Enable,LOW); //Place enable to low so the driver is enabeled
digitalWrite(dirPin, HIGH); //Place dirPin to HIGH so we spin CW
Serial.begin(9600); //Start serial port
Wire.begin();
sensor.init();
sensor.setTimeout(500);
PCICR |= (1 << PCIE0); //enable PCMSK0 scan so we can use interrupts
PCMSK0 |= (1 << PCINT0); //Set pin "D8" trigger an interrupt on "any" state change.
//See interrupt vector below the void loop
#if defined LONG_RANGE
// lower the return signal rate limit (default is 0.25 MCPS)
sensor.setSignalRateLimit(0.1);
// increase laser pulse periods (defaults are 14 and 10 PCLKs)
sensor.setVcselPulsePeriod(VL53L0X::VcselPeriodPreRange, 18);
sensor.setVcselPulsePeriod(VL53L0X::VcselPeriodFinalRange, 14);
#endif
#if defined HIGH_SPEED
// reduce timing budget to 20 ms (default is about 33 ms)
sensor.setMeasurementTimingBudget(20000);
#elif defined HIGH_ACCURACY
// // increase timing budget to 200 ms
// sensor.setMeasurementTimingBudget(200000);
#endif
}//End setup loop
void loop() {
if (loop_starts) //We reset angle when the magnet is detected on D8
{
angle = 0;
loop_starts = false;
}
digitalWrite(stepPin, HIGH); //Make one step
delayMicroseconds(Value); //Small delay
digitalWrite(stepPin, LOW); //Make another step
delayMicroseconds(Value); //Add another delay
int r = sensor.readRangeSingleMillimeters(); //Get distance from sensor
if (r > maxdist) //Limit the dsitance to maximum set distance above
{
r = maxdist;
}
Serial.print(angle); //Print the values to serial port
Serial.print(",");
Serial.print(r);
Serial.println(",");
angle = angle + angle_step; //Increase angle value by the angle/loop value set above (in this case 2.4º each loop)
}//end of void loop
//This is the magnet detection interruption routine
//----------------------------------------------
ISR(PCINT0_vect){
if(PINB & B00000001) //We make an AND with the pin state register, We verify if pin 8 is HIGH???
{
if(last_PIN_state == 0)
{
last_PIN_state = 1;
}
}
else if(last_PIN_state == 1) //Now verify if pin 8 is LOW??? -> Magnet was detected
{
last_PIN_state = 0;
loop_starts = true; //If yes, we set loop_starts to true so we reset the angle value
}
}//End of ISR







