
 About me
About me  History
History  Let's learn
Let's learn  Contact us
Contact us  Arduino tutorials
Arduino tutorials Circuits tutorials
Circuits tutorials  Robotics tutorials
Robotics tutorials Q&A
Q&A Blog
Blog  Arduino
Arduino  Circuits
Circuits Robotics
Robotics  Modules
Modules  Gadgets
Gadgets  Printers
Printers  Materials
Materials  3D objects
3D objects  3D edit
3D edit  Donate
Donate  Reviews
Reviews  Advertising
Advertising




Arduino drone V2.0 - Acc raw data read
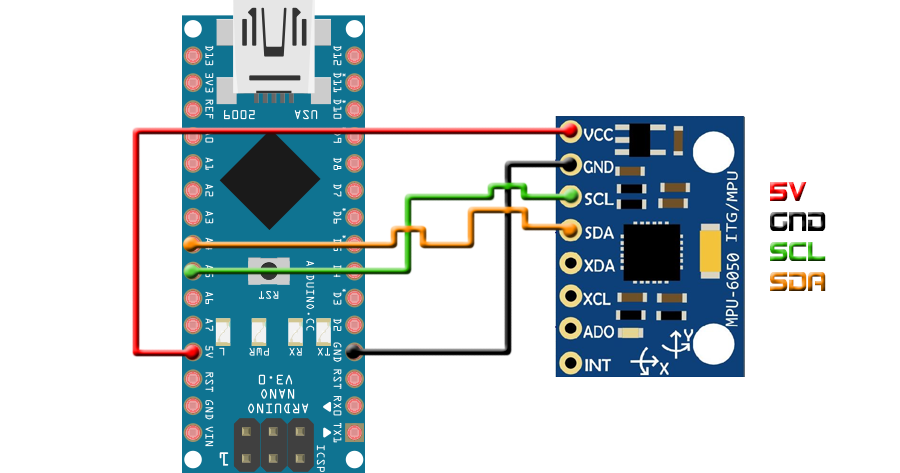
Unzip the file. Open the .ino file and upload it to the Arduino UNO/NANO. Make THIS connection open the serial monitor once uploaded. Remember to select 9600 baud rate or change the speed in the code.
Go back:
Or copy this code:
/* http://www.youtube.com/c/electronoobs
*
* This is an example where we configure te data of the MPU6050
* and read the Acceleration data and print it to the serial monitor
*
* Arduino pin | MPU6050
* 5V | Vcc
* GND | GND
* A4 | SDA
* A5 | SCL
*/
//Includes
#include <Wire.h>
//Variables
int acc_error=0; //We use this variable to only calculate once the Acc data error
float rad_to_deg = 180/3.141592654; //This value is for pasing from radians to degrees values
float Acc_rawX, Acc_rawY, Acc_rawZ; //Here we store the raw data read
float Acc_angle_x, Acc_angle_y; //Here we store the angle value obtained with Acc data
float Acc_angle_error_x, Acc_angle_error_y; //Here we store the initial Acc data error
void setup() {
Wire.begin(); //begin the wire comunication
Wire.beginTransmission(0x68); //begin, Send the slave adress (in this case 68)
Wire.write(0x6B); //make the reset (place a 0 into the 6B register)
Wire.write(0x00);
Wire.endTransmission(true); //end the transmission
Wire.beginTransmission(0x68); //Start communication with the address found during search.
Wire.write(0x1C); //We want to write to the ACCEL_CONFIG register
Wire.write(0x10); //Set the register bits as 00010000 (+/- 8g full scale range)
Wire.endTransmission(true);
Serial.begin(9600); //Remember to set this same baud rate to the serial monitor
/*Here we calculate the acc data error before we start the loop
* I make the mean of 200 values, that should be enough*/
if(acc_error==0)
{
for(int a=0; a<200; a++)
{
Wire.beginTransmission(0x68);
Wire.write(0x3B); //Ask for the 0x3B register- correspond to AcX
Wire.endTransmission(false);
Wire.requestFrom(0x68,6,true);
Acc_rawX=(Wire.read()<<8|Wire.read())/4096.0 ; //each value needs two registres
Acc_rawY=(Wire.read()<<8|Wire.read())/4096.0 ;
Acc_rawZ=(Wire.read()<<8|Wire.read())/4096.0 ;
/*---X---*/
Acc_angle_error_x = Acc_angle_error_x + ((atan((Acc_rawY)/sqrt(pow((Acc_rawX),2) + pow((Acc_rawZ),2)))*rad_to_deg));
/*---Y---*/
Acc_angle_error_y = Acc_angle_error_y + ((atan(-1*(Acc_rawX)/sqrt(pow((Acc_rawY),2) + pow((Acc_rawZ),2)))*rad_to_deg));
if(a==199)
{
Acc_angle_error_x = Acc_angle_error_x/200;
Acc_angle_error_y = Acc_angle_error_y/200;
acc_error=1;
}
}
}//end of error calculation
}//end of setup void
void loop() {
//////////////////////////////////////Acc read/////////////////////////////////////
Wire.beginTransmission(0x68); //begin, Send the slave adress (in this case 68)
Wire.write(0x3B); //Ask for the 0x3B register- correspond to AcX
Wire.endTransmission(false); //keep the transmission and next
Wire.requestFrom(0x68,6,true); //We ask for next 6 registers starting withj the 3B
/*We have asked for the 0x3B register. The IMU will send a brust of register.
* The amount of register to read is specify in the requestFrom function.
* In this case we request 6 registers. Each value of acceleration is made out of
* two 8bits registers, low values and high values. For that we request the 6 of them
* and just make then sum of each pair. For that we shift to the left the high values
* register (<<) and make an or (|) operation to add the low values.
If we read the datasheet, for a range of+-8g, we have to divide the raw values by 4096*/
Acc_rawX=(Wire.read()<<8|Wire.read())/4096.0 ; //each value needs two registres
Acc_rawY=(Wire.read()<<8|Wire.read())/4096.0 ;
Acc_rawZ=(Wire.read()<<8|Wire.read())/4096.0 ;
/*Now in order to obtain the Acc angles we use euler formula with acceleration values
after that we substract the error value found before*/
/*---X---*/
Acc_angle_x = (atan((Acc_rawY)/sqrt(pow((Acc_rawX),2) + pow((Acc_rawZ),2)))*rad_to_deg) - Acc_angle_error_x;
/*---Y---*/
Acc_angle_y = (atan(-1*(Acc_rawX)/sqrt(pow((Acc_rawY),2) + pow((Acc_rawZ),2)))*rad_to_deg) - Acc_angle_error_y;
/*Uncoment the rest of the serial prines
* I only print the Y raw acceleration value */
//Serial.print("AccX raw: ");
//Serial.print(Acc_rawX);
//Serial.print(" | ");
//Serial.print("AccY raw: ");
//Serial.print(Acc_rawY);
//Serial.print(" | ");
Serial.print("AccZ raw: ");
Serial.print(Acc_rawZ);
Serial.print(" | ");
//Serial.print("AccX angle: ");
//Serial.print(Acc_angle_x);
//Serial.print(" | ");
Serial.print("AccY angle: ");
Serial.print(Acc_angle_y);
Serial.println(" ");
}
Go back: