About me
About me  History
History  Let's learn
Let's learn  Contact us
Contact us  Arduino tutorials
Arduino tutorials Circuits tutorials
Circuits tutorials  Robotics tutorials
Robotics tutorials Q&A
Q&A Blog
Blog  Arduino
Arduino  Circuits
Circuits Robotics
Robotics  Modules
Modules  Gadgets
Gadgets  Printers
Printers  Materials
Materials  3D objects
3D objects  3D edit
3D edit  Donate
Donate  Reviews
Reviews  Advertising
Advertising




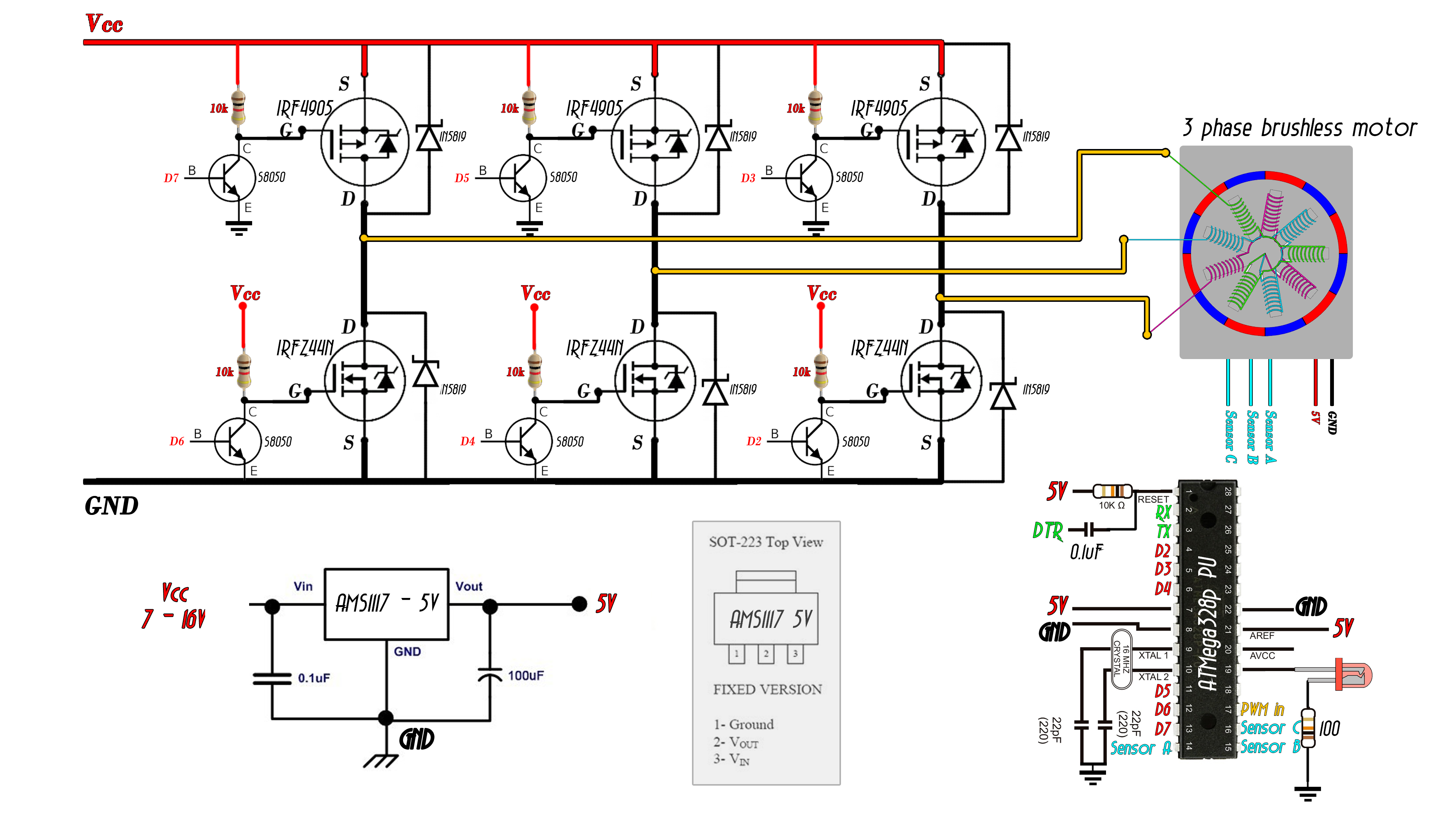
Homemade sensored ESC (PWM input code)
Download the .zip file below. Install it on your Arduino IDE.
This code is for the schematic with the PWM input for the speed control. Read all the comments in the code.
/*
* Electronoobs sensored brushed motor electronic speed controller code
* Connect the sensors to pins 8, 9 and 10
* High gates to pins 7, 5 and 3
* Low gates to 6, 4 and 2
* More on http://www.electronoobs.com/eng_circuitos_tut19.php
*/
int pot = A3;
int SensorA = 8;
int SensorB = 9;
int SensorC = 10;
int pwm_pin = 11;
//We create variables for the time width value of the PWM input signal
unsigned long counter, current_count;
byte lastPWM_state;
int PWM_width = 1000;
int fase = 1;
int Delay=4000;
unsigned long previousMillis = 0;
unsigned long currentMillis = 0;
int fase = 1;
int Delay=4000;
unsigned long previousMillis = 0;
unsigned long currentMillis = 0;
void setup() {
//Define sensor pins and potentiometer as inputs
pinMode(pot,INPUT);
pinMode(SensorA,INPUT);
pinMode(SensorB,INPUT);
pinMode(SensorC,INPUT);
pinMode(pwm_pin,INPUT);
DDRD |= B11111100; // Sets D2, D3, D4, D5, D6 and D7 as OUTPUT
PORTD &= B00000011; // D2-D7 LOW
PCICR |= (1 << PCIE0); //enable PCMSK0 scan
PCMSK0 |= (1 << PCINT0); //Set pin D8 trigger an interrupt on state change. sensor A
PCMSK0 |= (1 << PCINT1); //Set pin D9 trigger an interrupt on state change. sensor B
PCMSK0 |= (1 << PCINT2); //Set pin D10 trigger an interrupt on state change. sensor C
PCMSK0 |= (1 << PCINT3); //Set pin D11 trigger an interrupt on state change. PWM input for speed
currentMillis = micros();
}
void loop() {
currentMillis = micros();
if(currentMillis - previousMillis >= Delay){
previousMillis += Delay;
if(PWM_width > 1070)
{
switch(fase){
//Phase1 A-B
case 1:
PORTD = B10010000; // Pin 7 and 4 to HIGH
break;
//Phase2 C-B
case 2:
PORTD = B00011000; // Pin 3 and 4 to HIGH
break;
//Phase3 C-A
case 3:
PORTD = B01001000; // Pin 3 and 6 to HIGH
break;
//Phase4 B-A
case 4:
PORTD = B01100000; // Pin 5 and 6 to HIGH
break;
//Phase5 B-C
case 5:
PORTD = B00100100; // Pin 5 and 2 to HIGH
break;
//Phase6 A-C
case 6:
PORTD = B10000100; // Pin 7 and 2 to HIGH
break;
}//end of switch
}//End of if 1070
}//Case of if millis
else
{
PORTD = B01010100; // Else we stop everything
}
Delay=map(PWM_width,1000,1800,3000,10);
}//Void end
ISR(PCINT0_vect){
current_count = micros();
if(PINB & B00001000 ){
if(lastPWM_state == 0){
lastPWM_state = 1;
counter = current_count;
}
}
else if(lastPWM_state == 1){
lastPWM_state = 0;
PWM_width = current_count - counter;
}
//This part will run any time any of the sensor pins will change its value.
if( (PINB & B00000101) && fase == 6 ){
fase = 1;
}
if( (PINB & B00000100) && fase == 1 ){
fase = 2;
}
if( (PINB & B00000110) && fase == 2 ){
fase = 3;
}
if( (PINB & B00000010) && fase == 3 ){
fase = 4;
}
if( (PINB & B00000011) && fase == 4 ){
fase = 5;
}
if( (PINB & B00000001) && fase == 5 ){
fase = 6;
}
}