
 Sobre nosotros
Sobre nosotros  Historia
Historia  A estudiar
A estudiar  Contacto
Contacto  Arduino
Arduino  Circuitos
Circuitos Robótica
Robótica  Modulos
Modulos  Materiales
Materiales  Impresoras
Impresoras  Objetos 3D
Objetos 3D  Edición 3D básica
Edición 3D básica  Noticias
Noticias  Gadgets
Gadgets  Preguntas
Preguntas Sabias que?
Sabias que? ESC - control electrónico de velocidad
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
Introducción!
Siempre que tenemos un sistema con un microcontrolador actuando sobre motores, seguramente encontraremos problemas de tensión e corriente. Los micro procesadores suelen trabajar a una tensión de 3.3 o 5 voltios y utilizan muy poca corriente del orden de mA. En cambio los motores son bestias cuyo principal alimento es la corriente. En un dicho proyecto los motores utilizados pueden llegar a consumir más de 20A y dicha corriente no la dará ningún microcontrolador. Por lo tanto tenemos que establecer una separación con reguladores de tensión entre los 12 voltios que usaran los motores y los 5 de la parte de procesado. Además cuando digo motores me refiero en este caso a motores trifásico, motores sin escobillas o brushless. Al tener motors trifásico las cosas se complican a comparación con un simple motor DC. Tenemos que alimentar 3 entradas al motor en una secuencia muy precisa. Para generar la secuencia de activación o desactivación de las entradas al motor se usará un ESC (control electrónico de velocidad).
Observamos en la animación de arriba que tenemos que conmutar 3 entradas H1, H2 y H3 en una cierta secuencia. Nosotros llamaremos a las 3 entradas, entrada A, B y C. La secuencia que necesitamos crear será la siguiente:
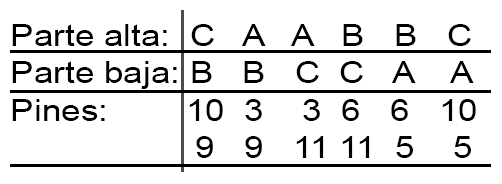
Donde la parte alta significa los transistores conectados a Vdd de puente trifásico y la parte baja los transistores conectados a GND, puente trifásico que se vera a continuación. Los pines representan las conexiones al microcontrolador que tambien se hablará más adelante
Esquemático puente trifásico!
Primero un poco de teoría
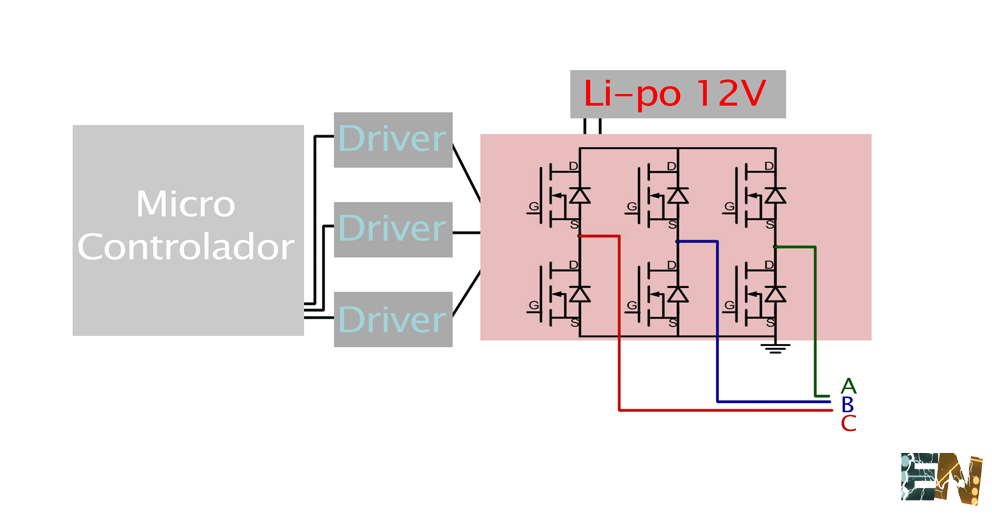
Observamos el esquema general de un controlador electrónico de velocidad y lo dividiremos en tres partes. Primero de todo necesitamos un microcontrolador que hará la parte de procesado. El microcontrolador procesa los datos y decidirá la señal que enviara al siguiente apartado, los drivers, la función de estos será aplicar la tensión necesaria en las puertas de los transistores del tercer apartado e abrir o cerrar el paso de corriente a través de dichos transistores. Finalmente el tercer apartado lleva el nombre de puente trifásico. Tenemos que alimentar un motor trifásico siguiendo una cierta secuencia de los sentidos que tomara la corriente a través de las bobinas del motor. Abriendo y cerrando los 6 transistores de una manera muy precisa se logra tener la secuencia deseada para realizar el giro del motor.
Como ya hemos mencionado el esquema es muy general. Para tener la velocidad del motor sincronizada con la secuencia que realiza el puente trifásico necesitaremos controlar en todo momento la posición del motor y comparar dicha posición con la deseada por el microcontrolador. Para realizar este apartado se hará lo siguiente, medir la EMF o el campo electromagnético creado por el giro del motor. Igual que una dinamo los imanes crearan una cierta fuerza sobre las bobinas del motor. Medir la tensión que cae en los terminales del motor podremos hacer un fino procesado y saber en qué posición se encuentra el motor y sincronizar su giro.
Giro del motor con mas detalle:
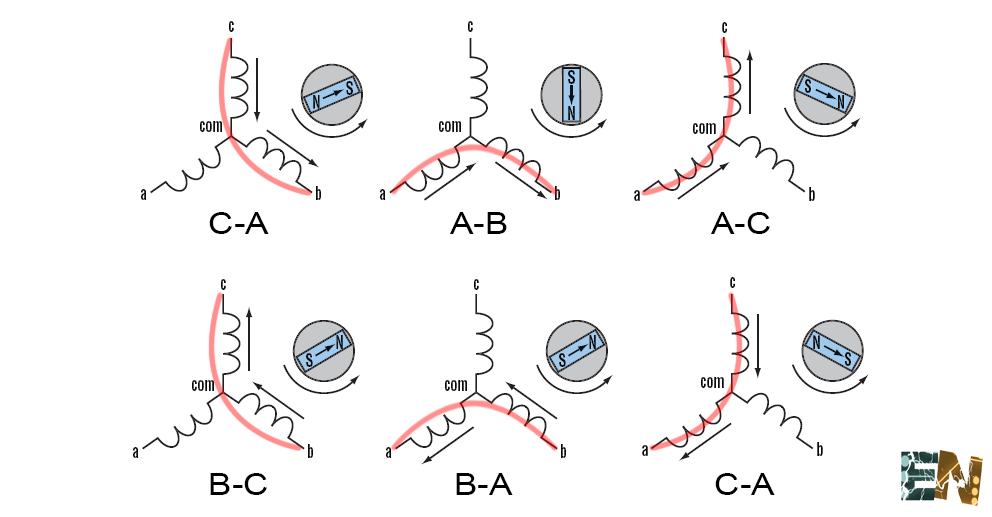
Para entender mejor el funcionamiento interno de un motor brushless trifásico nos fijamos en la figura de arriba.Sabemos que el motor internamente tiene un número múltiplo de 3 de bobinas. Las bobinas están distribuidas de una forma equidistante alrededor del perímetro del motor. De esta manera entre cada bobina el eje girara 360 grados dividido por el número de bobinas. En nuestro caso el motor es de 12 bobinas, 4 bobinas para cada una de las 3 entradas. En la figura dearriba estas bobinas están representadas por solo una para cada entrada. La parte móvil del motor puede ser exterior o interior a las bobinas, en este caso es exterior. Alrededor de la parte móvil están distribuidos de la misma manera que las bobinas con el mismo espaciado 12 imanes muy fuertes. Sabemos que al pasar corriente por las bobinas se creara un campo magnético con sentido dependiendo del sentido de la corriente. Alternando los sentidos de la corriente a través de las bobinas alternamos las polaridades de los campos eléctricos creados y de esta manera tendremos polos opuestos entre las bobinas y los imanes en ciertos momentos deseados. Mirando la figura observamos que empezamos conmutando la puerta superior de la entrada C y la puerta inferior de la entrada A. De esta manera hacemos correr corriente desde C a A creando un campo magnético a través de estas dos bobinas. Dicho campo al estar opuesto al campo de los imanes moverá el eje un intervalo adelante (360/12 grados). Justo en el momento en que las bobinas pasan por el medio del imán siguiente tenemos que conmutar al siguiente estado que es introducir corriente de A a B y así para adelante creando un bucle infinito que se repite cada 6 estados.
Como detectar el BEMF y sincronisar nuestra secuencia:
Sabemos que un imán crea un campo magnético a su alrededor. Una vez se pone una bobina delante suyo, el movimiento cambiara el flujo del campo a través de la bobina. En cuanto más flujo atraviesa la bonina más intensidad pasará por el bobinado y más tensión puede caer en los terminales. A continuación nos fijamos en un ejemplo de detección del BEMF en las figuras :
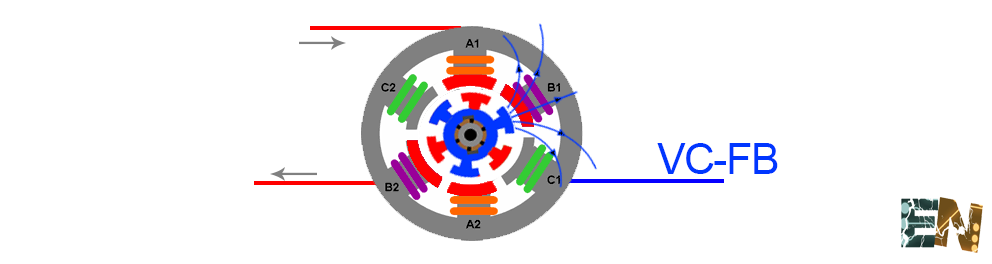
Observamos en la figura que se ha activado la puerta superior de la salida A y la inferior de la salida B, de esta manera tenemos una corriente que circula por las bobinas A y be en el sentido mostrado en la figura. Tendremos por lo tanto un campo magnético igual en A que en B ya que el bobinado es opuesto en las dos entradas. Dicho campo al ser opuesto al campo creado por los imanes, empuja el eje a girar en el sentido de las agujas del reloj. Llamaremos al color azul polarización norte y al rojo polarización sur. Nos fijamos en el imán azul. Sus líneas de campo salen hacia el exterior. Por la bobina C de momento dichas línea de campo no llegar a atravesar.
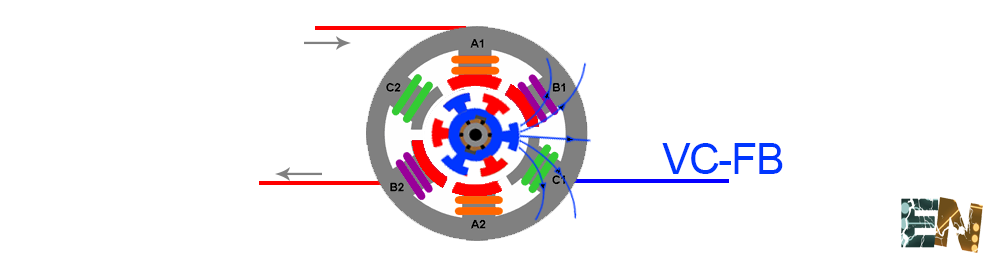
En la siguiente figura después de unos instantes se observa que ya empiezan a atravesar la bobina C líneas del campo creado por el imán. Por lo tanto una corriente circulara por el bobinado y se empieza a ver afectado el potencial detectado en VC-FB tal como se ha explicado anteriormente. A medida que el campo creado por el imán es cada vez más perpendicular a la bobina C, el flujo será cada vez mayor.
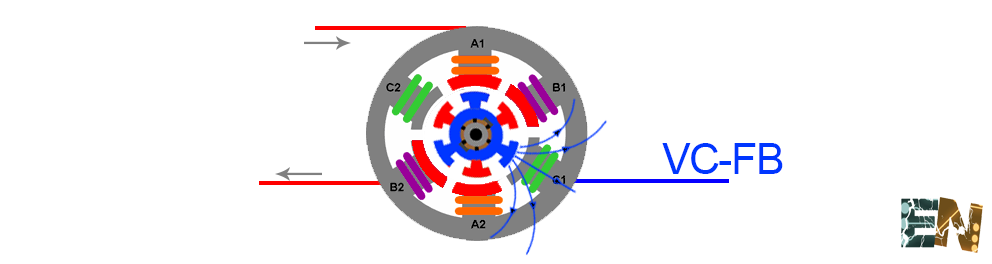
En la siguiente figura observamos que el imán del eje está completamente enfrentado a la bobina C. Eso quiere decir que el flujo es máximo por lo tanto la intensidad que atraviesa el bobinado será máximo. Es justamente ese instante en que la polarización de las bobonas debe cambiar. Ser capaz de detectar ese instante significa ser capaz de perfectamente cambiar de estado. Ya que tenemos una salida en tensión en función de la posición del rotor dicho cambio sincronizado de estado será posible.
Empezamos
Ya sabemos que debemos hacer. Necesitamos montar el puente trifásico, conectar un microcontrolador que lea las salidas de BEMF del motor y cree una secuencia para alternar las entradas al motor. Primero de todo creamos un esquematico en el programa Design Spark. Se puede utilizar cualquier otro programa de diseño de PCB. Para hacer el esquemático importamos todos los componentes necesarios especificados al principio del tutorial. Hacemos las conexiones y pasamos al PCB.
Esquemático en Design Spark: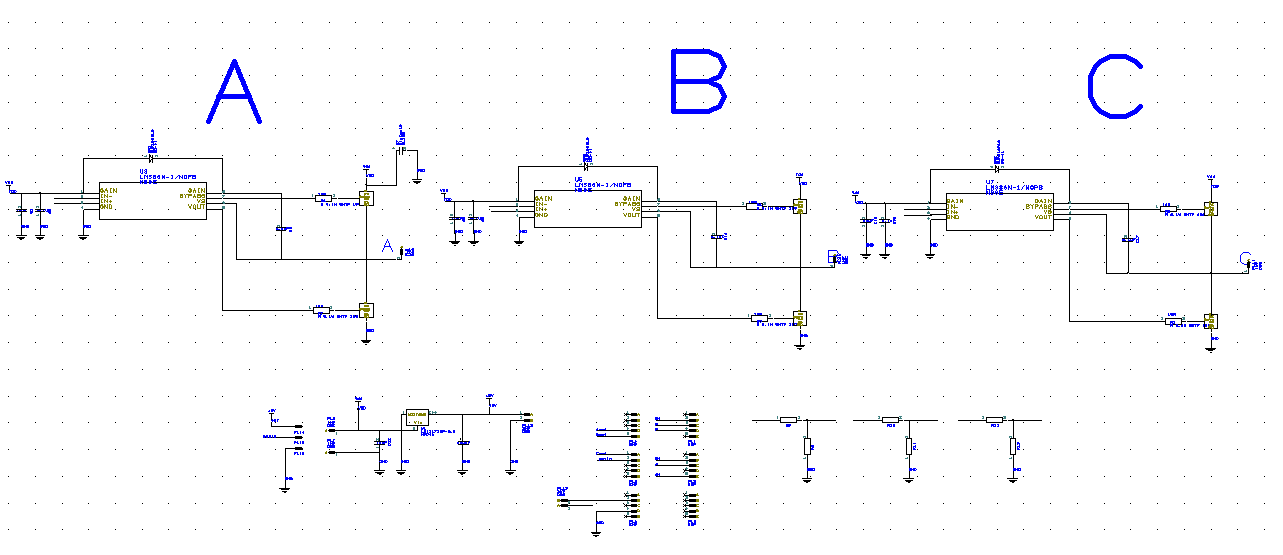
Es cierto que no se ven todos los datos, para eso deberas descargar el projecto en Design Spark en el siguiente link:
De todas formas observamos los 3 controladores (drivers) duales conectados cada uno a 2 transistores MOSFET. Las entradas de los controladores estan conectadas al microcontrolador Arduino Nano. Las salidas del puente trifásico cada una con un divisor de tensión con resisténcias de 1k y 2 k conectadas a los pines de entrada analógica del Arduino. Para hacer la conexíon de los controladores tenemos en cuenta el siguiente esquema:
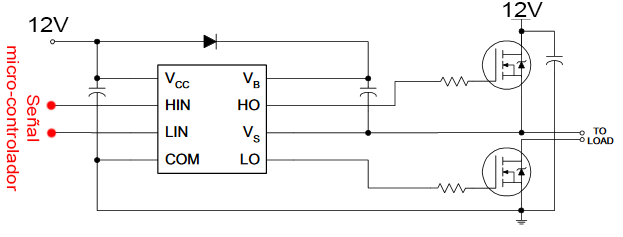
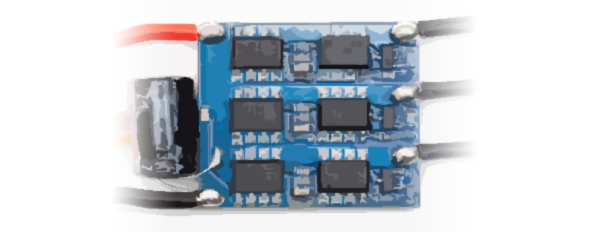
Ya tenemos el esquemático y pasamos ahora al PCB, Creamos una PCB de dos capas y distribuimos todos los componentes:
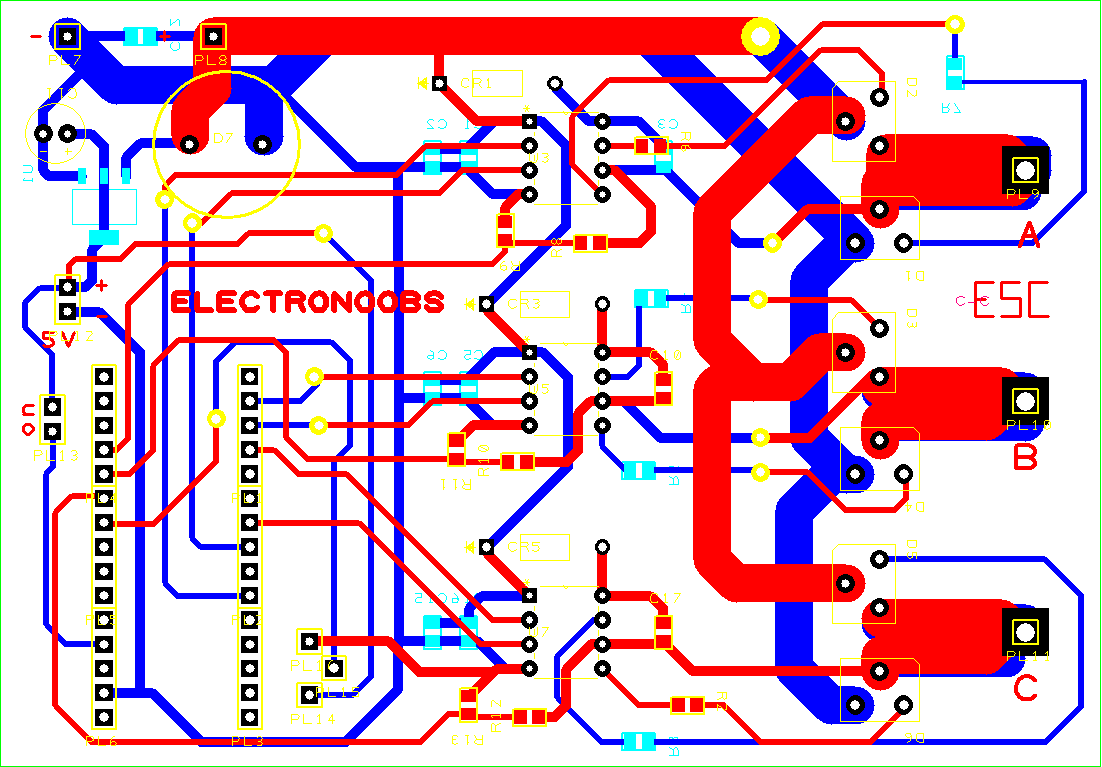
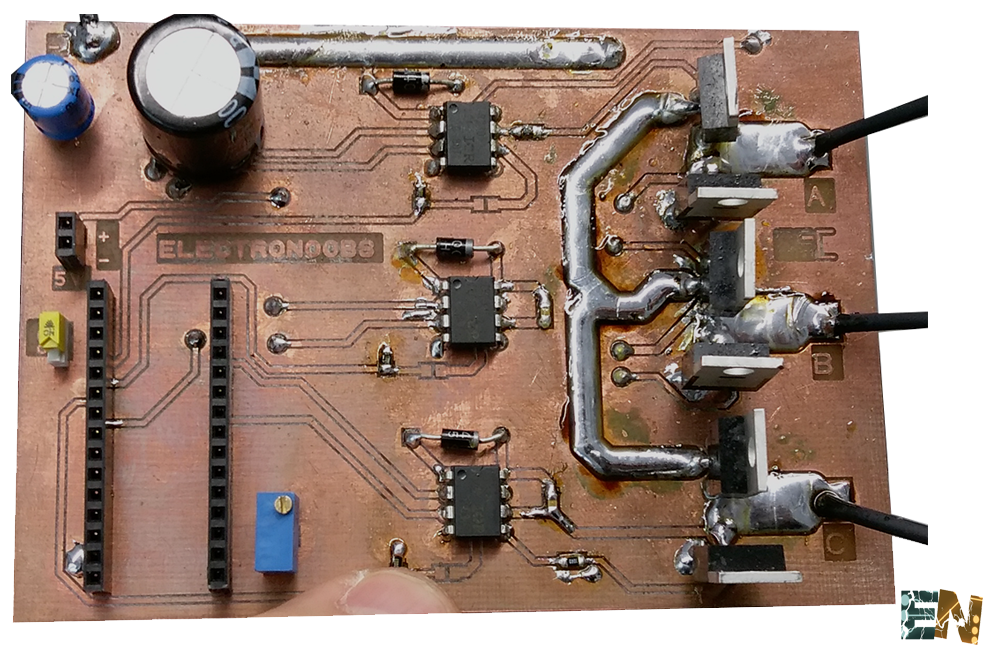
Observamos los pines necesarios para El arduino, la entrada de 12-15 voltios, los controladores (drivers) y los 6 transistores MOSFET. También observamos que las pistas principales son muy gruesas, 4mm, eso es debido a que a través de ellas pasaran mas de 20A de corriente. El egulador de tensión proporcionará 5 voltios limpios al arduino. Una vez tenemos la PCB generamos los gerbers para enviarlos a la fresadora CNC. Dicha maquina creará nuestra PCB en una doble lamina de cobre fresando con un taladro los gerbers creados. Despues del fresado (milling) , nuestra placa ha quedado de la siguiente manera:
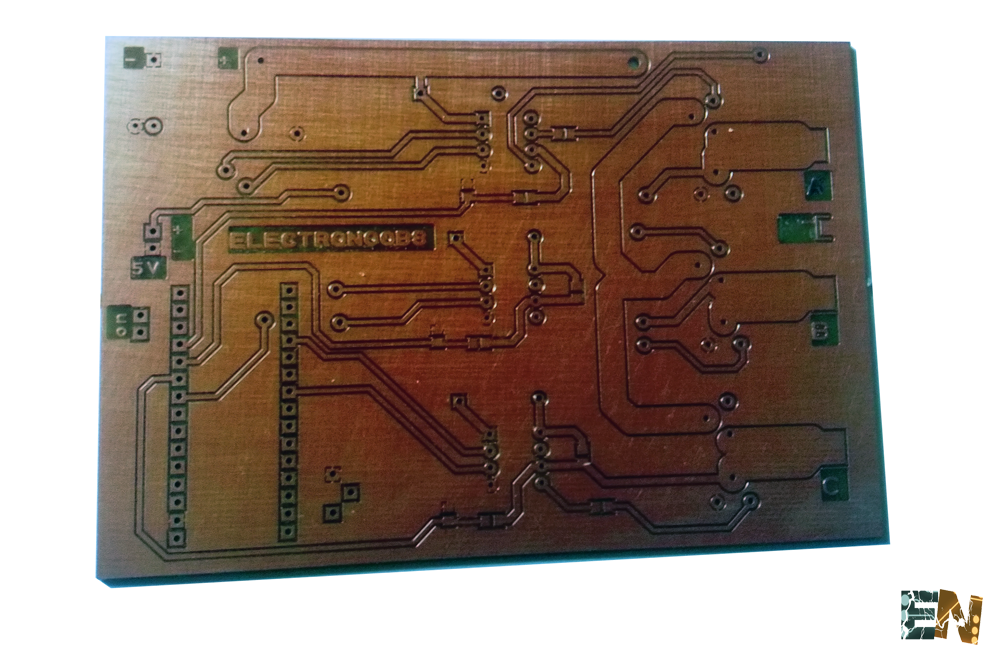
Empezamos a soldar los componentes uno por uno. Llenaremos las pistas principales con mucho estaño para darles más aguante.
Ya hemos acabado nuestra PCB. Conectaremos nuestro Arduino en su lugar y pasamos a la parte de código. Primero ejecutarémos un código sin detección de la BEMF donde simplemente variando el potenciómetro que hemos añadido a nuestra PCB, variará la velocidad del motor. Si no detectamos la EMF y sin el algoritmo que usaremos para sincronisar el giro del motor, en cuqlquier momento el motor puede parar y nunca volver a arrancar, además girara con poca potencia.
Puedes descargar el
Observamos en el codigo que no se usan "delays" ya que cualquier retardo afectara la secuencia entera del giro. Se crean 6 variables para los estados de cada transistor del puente trifásico. Se crearán 6 casos para completar una secuencia. El tiempo de cambio entre cada secuencia viene dado por el valor leido con la entrada analógica del potenciómetro.
Complicamos la cosa: añadimos lectura de EMF:
Puedes descargar el
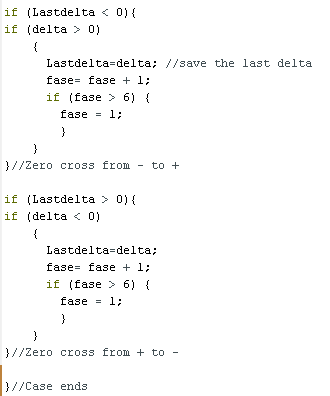
Cargamos el código de arduino con detección de EMF. Si miramos el código observamos que tenemos que seleccionar los pines analógicos que harán la medida del voltaje en cada terminal, en mi caso son los pines A2, A3 y A. Los pines que activarán los transistores serán los mismos. Para el cambio de fase se crean dos deltas. Una delta actual y una anterior ya que tendremos un cambio de fase en función de la detección del "cero virtual" que puede ser bajando desde tensiones positivas a negativas o al revés, subiendo desde tensiones negativas a positivas, por eso la necesidad de dos deltas. En el Setup se define la funcionalidad de los pines. En el loop primero medimos la tensión en cada entrada analógica y hacemos la suma de las 3. Dicha suma será nuestro cero virtual que representa el punto comun de la intersección de las tres tensiones. El retardc se hara de la misma manera que en el caso sin emf contando los microsegundos que transcuren y cambiando el valor con un potenciómetro pero el cambio de fase vendra afectado por los valores de delta. Se calculara la delta en cada fase y al final del código se hara una comparación para detectar el momento en que pasamos por el "cero virtual". Será ese el momento en que ahremos el cambio de fase.
Video Extra puente H:
Ver el siguiente tutorial aquí:
Electrónica
El funcionamiento del siguiente dispositivo está basado en el efecto Edison. Edison fue el primero que observó en 1883 la emisión termoiónica, al colocar una lámina dentro de una bombilla para evitar el ennegrecimiento que producía en la ampolla de vidrio el filamento de carbón. Cuando se polarizaba positivamente la lámina metálica respecto al filamento, se producía una pequeña corriente entre el filamento y la lámina. Este hecho se producía porque los electrones de los átomos del filamento, al recibir una gran cantidad de energía en forma de calor, escapaban de la atracción del núcleo (emisión termoiónica) y, atravesando el espacio vacío dentro de la bombilla, eran atraídos por la polaridad positiva de la lámina. El ingeniero británico Sir John Ambrose Fleming (1849-1945) aplicó el efecto Edison a un tubo para detectar las ondas hertzianas e inventó así el DIODO, primer tubo electrónico en el que se había hecho el vacío y en cuyo interior existía un ÁNODO (electrodo positivo) y un CÁTODO (electrodo negativo). El último, al alcanzar el estado de incandescencia, emitía electrones con carga negativa que eran atraídos por el ánodo; es decir, el diodo actuaba como una válvula que sólo dejaba pasar la corriente en un sentido. El otro gran paso lo dio Lee De Forest cuando inventó el triodo en 1906. Este dispositivo es básicamente como el diodo de vacío, pero se le añadió una rejilla de control situada entre el cátodo y la placa, con el objeto de modificar la nube electrónica del cátodo, variando así la corriente de placa. Este fue un paso muy importante para la fabricación de los primeros amplificadores de sonido, receptores de radio, televisores, etc. Lee De Forest es considerado el Padre de la electrónica, ya que antes del Triodo, solo nos limitábamos a convertir la corriente alterna en corriente directa o continua, o sea, solo se construían las fuentes de Alimentación, pero con la creación del Triodo de Vacío, vino la Amplificación de todo tipo de señales, sobre todo la de Audio, la Radio, la TV y todo lo demás, esto hizo que la industria de estos equipos tuvieran un repunte tan grande que ya para las décadas superiores a 1930 se acuñara la palabra por primera vez de "Electrónica" para referirse a la tecnología de estos equipos emergentes. Conforme pasaba el tiempo, las válvulas de vacío se fueron perfeccionando y mejorando, apareciendo otros tipos, como los tetrodos (válvulas de cuatro electrodos), los pentodos (cinco electrodos), otras válvulas para aplicaciones de alta potencia, etc. Dentro de los perfeccionamientos de las válvulas se encontraba su miniaturización. Pero fue definitivamente con el transistor, aparecido de la mano de Bardeen y Brattain, de la Bell Telephone Company, en 1948, cuando se permitió aún una mayor miniaturización de aparatos tales como las radios. El transistor de unión apareció algo más tarde, en 1949. Este es el dispositivo utilizado actualmente para la mayoría de las aplicaciones de la electrónica. Sus ventajas respecto a las válvulas son entre otras: menor tamaño y fragilidad, mayor rendimiento energético, menores tensiones de alimentación, etc. El transistor no funciona en vacío como las válvulas, sino en un estado sólido semiconductor (silicio), razón por la que no necesita centenares de voltios de tensión para funcionar. A pesar de la expansión de los semiconductores, todavía se siguen utilizando las válvulas en pequeños círculos audiófilos, porque constituyen uno de sus mitos1 más extendidos. El transistor tiene tres terminales (el emisor, la base y el colector) y se asemeja a un triodo: la base sería la rejilla de control, el emisor el cátodo, y el colector la placa. Polarizando adecuadamente estos tres terminales se consigue controlar una gran corriente de colector a partir de una pequeña corriente de base. En 1958 se desarrolló el primer circuito integrado, que alojaba seis transistores en un único chip. En 1970 se desarrolló el primer microprocesador, Intel 4004. En la actualidad, los campos de desarrollo de la electrónica son tan vastos que se ha dividido en varias disciplinas especializadas. La mayor división es la que distingue la electrónica analógica de la electrónica digital. La electrónica es, por tanto, una de las ramas de la ingeniería con mayor proyección en el futuro, junto con la informática.