
 Sobre nosotros
Sobre nosotros  Historia
Historia  A estudiar
A estudiar  Contacto
Contacto  Arduino
Arduino  Circuitos
Circuitos Robótica
Robótica  Modulos
Modulos  Materiales
Materiales  Impresoras
Impresoras  Objetos 3D
Objetos 3D  Edición 3D básica
Edición 3D básica  Noticias
Noticias  Gadgets
Gadgets  Preguntas
Preguntas Sabias que?
Sabias que? Mini impresora CNC

1.
2.
3.
4.
5.
6.
7.
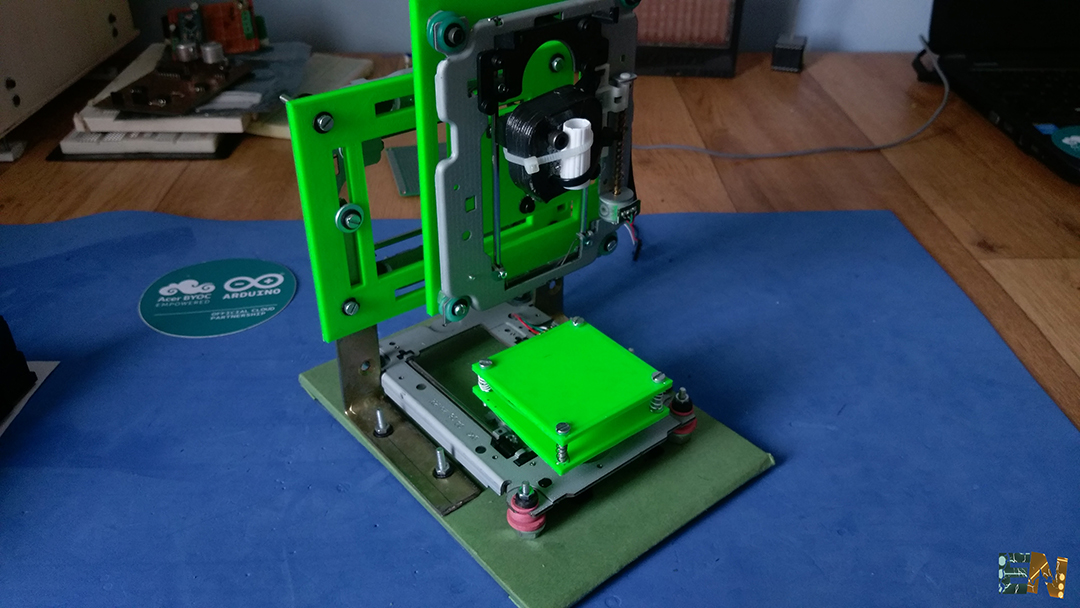
Introducción!
Vamos a aprender a montar nuestra propia impresora 3D. Esto será un prototipo, pero una vez logras construirlo seguramente podrás construir impresoras mucho más grandes y con mucha más precisión. EL principio será el mismo, Utilizaremos motores paso a paso para controlar el movimiento de los 3 ejes de nuestra maquina.
CNC - Qué es?
El sistema se basa en el control de los movimientos de la herramienta de trabajo con relación a los ejes de coordenadas de la máquina, usando un programa informático ejecutado por una computadora.
En el caso de un torno, hace falta controlar los movimientos de la herramienta en dos ejes de coordenadas: el eje de las X para los desplazamientos longitudinales del carro y el eje de las Z para los desplazamientos transversales de la torre.
En el caso de las fresadoras se controlan también los desplazamientos verticales, que corresponden al eje Y. Para ello se incorporan servomotores en los mecanismos de desplazamiento del carro y la torreta, en el caso de los tornos y en la mesa en el caso de la fresadora; dependiendo de la capacidad de la máquina, esto puede no ser limitado únicamente a tres ejes.
Motor paso a paso - Qué es?
El motor a paso es un dispositivo electromecánico que convierte una serie de impulsos eléctricos en desplazamientos angulares discretos, lo que significa que es capaz de avanzar una serie de grados (paso) dependiendo de sus entradas de control. El motor paso a paso se comporta de la misma manera que un conversor digital-analógico (D/A) y puede ser gobernado por impulsos procedentes de sistemas lógicos.
Este motor presenta las ventajas de tener precisión y repetitividad en cuanto al posicionamiento. Entre sus principales aplicaciones destacan como motor de frecuencia variable, motor de corriente continua sin escobillas, servomotores y motores controlados digitalmente.
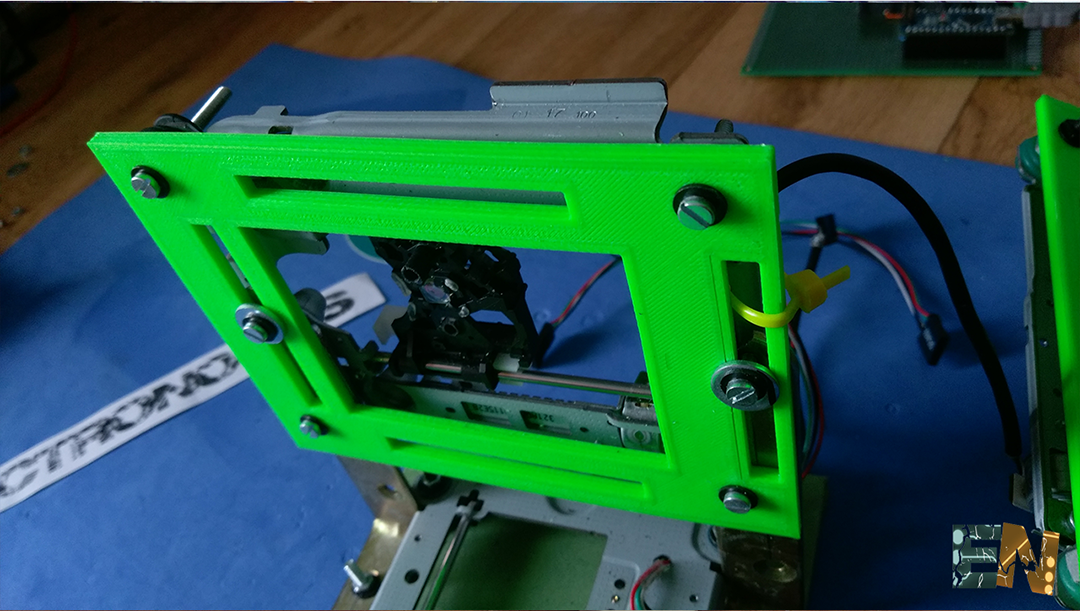
Primero de todo debemos abrir las 3 grabadoras de DVD para extraer los motores y las partes móviles necesarias para la construción de nuestra máquina. Debemos abrirlos con cuidado para no romper las piezas que necesitamos. En la siguiente imagen podemos observar el interior de una grabadora DVD.
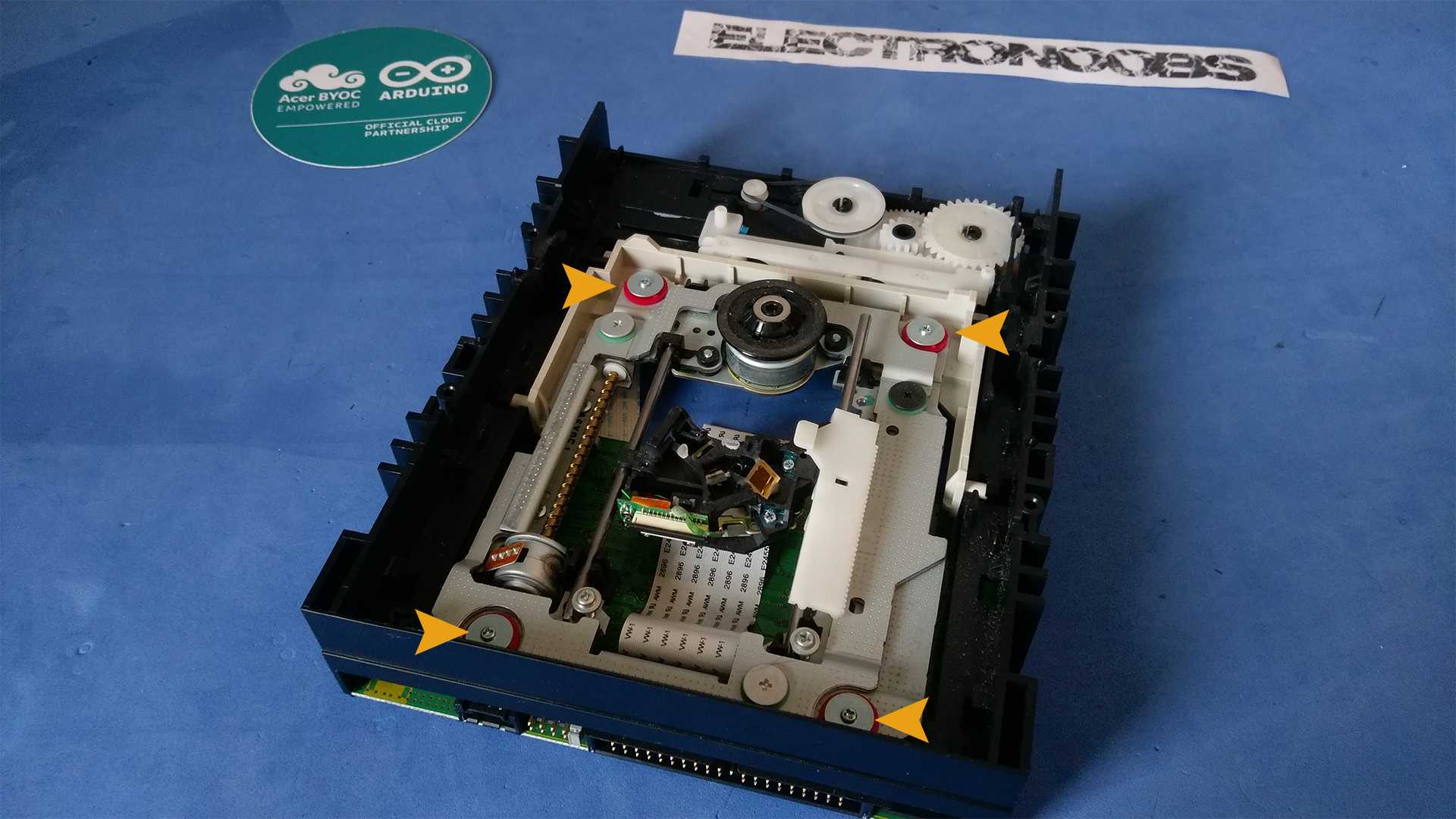
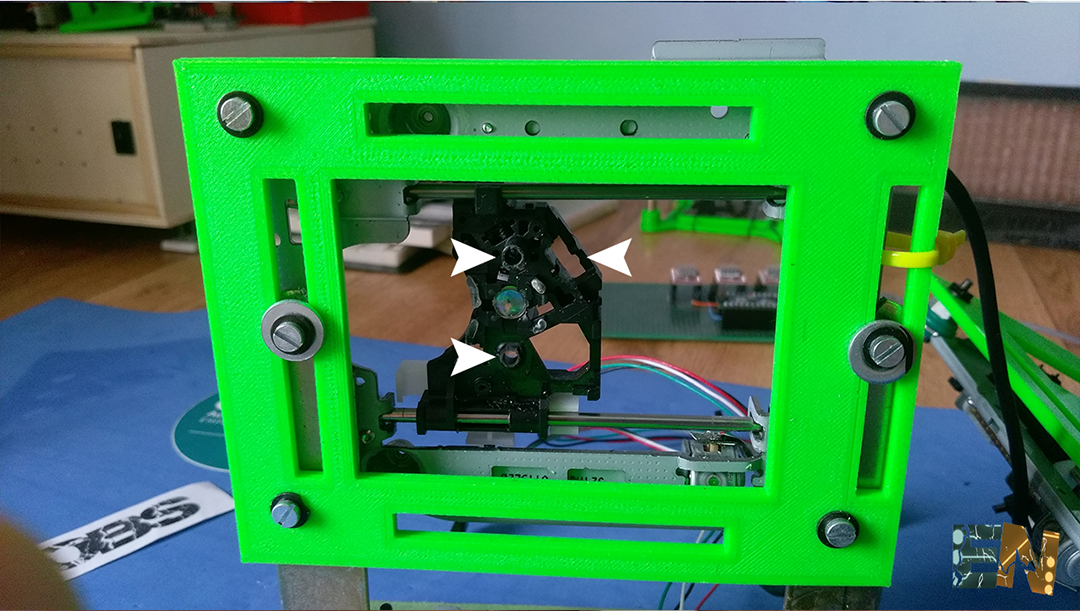
Simplemente destornillando los 4 tornillos marcados en la imágen podemos extraer la pieza que necesitamos, un eje entero junto a un motor paso a paso. Podemos observar en la siguiente imágen la pieza que acabamos de sacar.
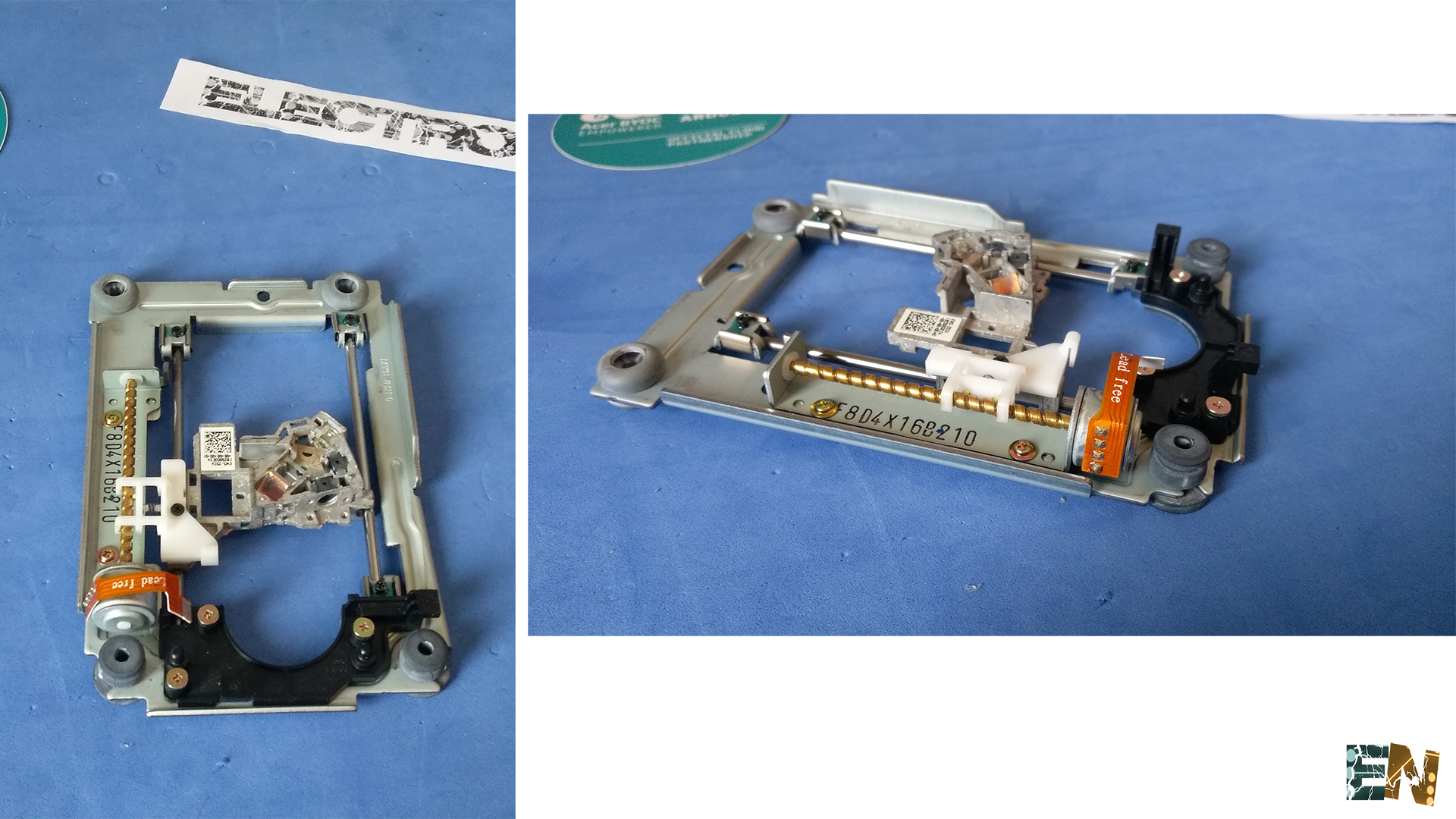
Ahora ya que tenemos los 3 ejes que necesitamos, pasamos a construir la maquina en sí. Antes de empezar puedes ver los tamaños de mi máquina en la siguiente imágen.
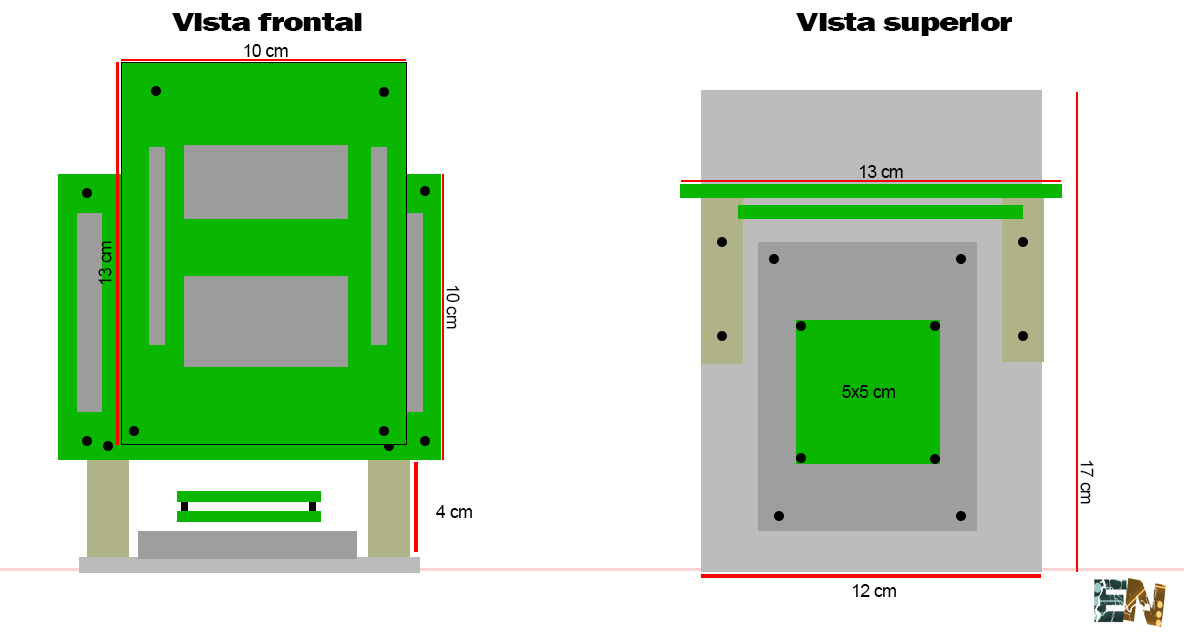
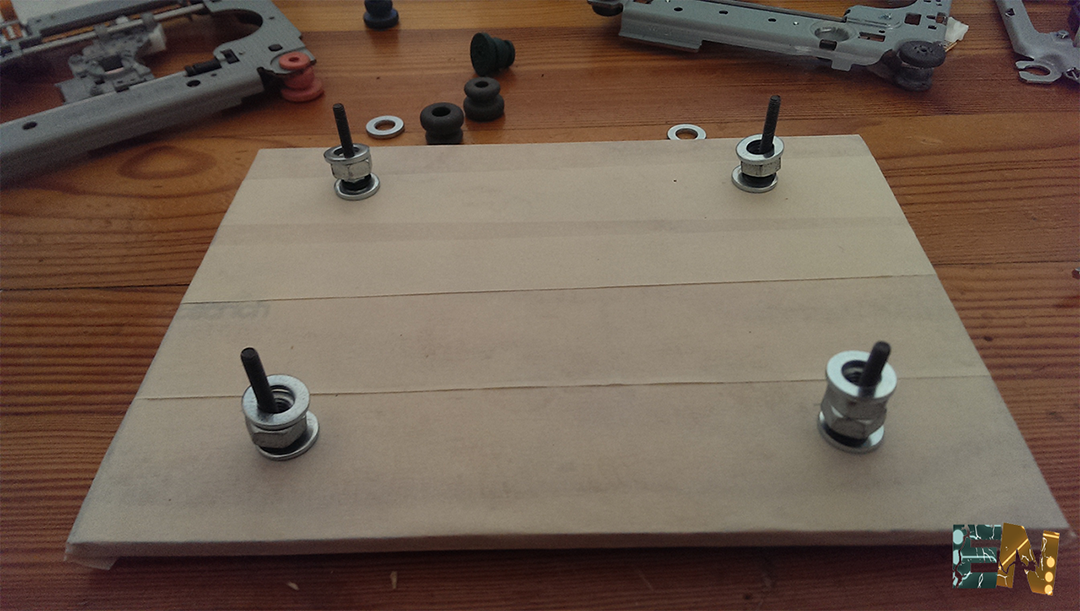
Para eso cortamos una placa de madera de 12x17 cm que será nuestra base. Muy centrado haremos 4 agujeros en la forma adecuada como para atornillar el primer eje, que será el eje "y". Comprobamos que los agujeros de nuestra placa coinciden con los del eje sacado de las grabadoras y atornillamos 4 tornillos.
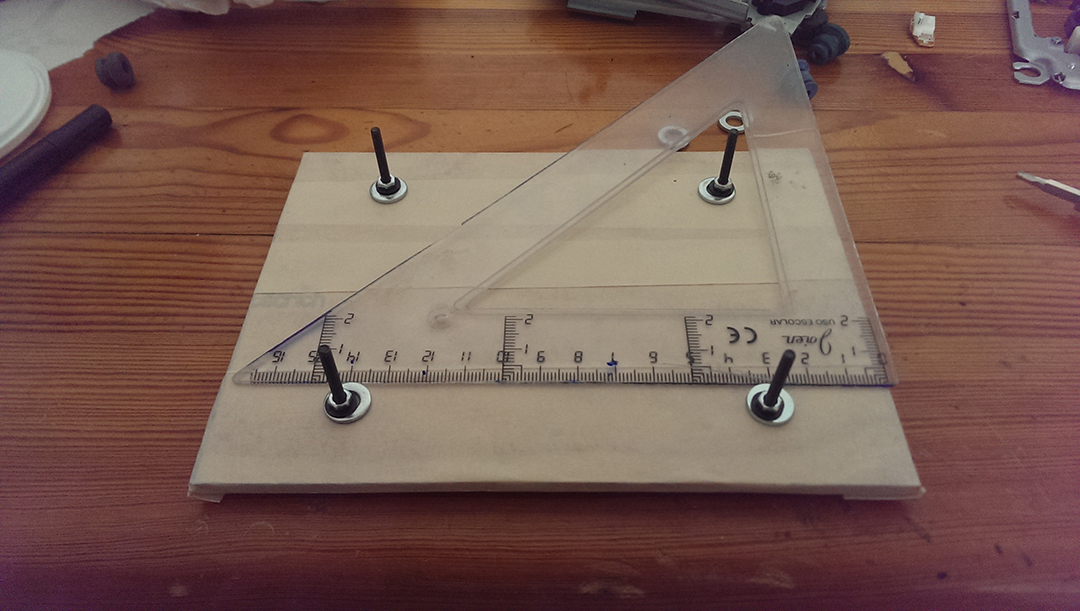
Antes de añadir el eje ponemos separadores en cada tornillo, de esta manera tendremos un pequeño espacio entre el motor y la base.
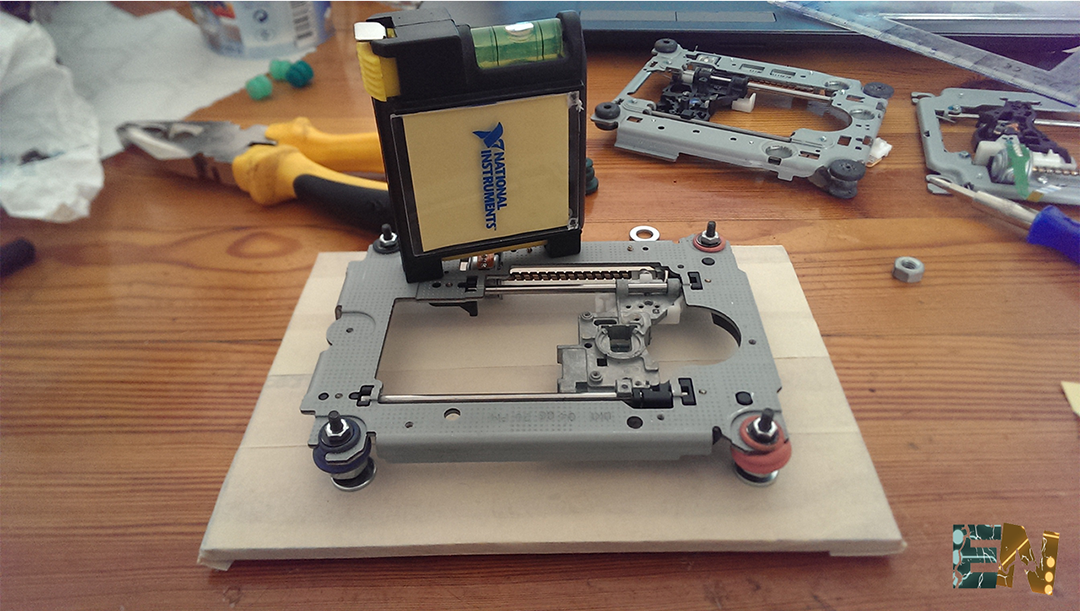
Ponemos el eje en su sitio y verificando en todo momento de que esta perfectamente horizontal lo atornillamos bien.
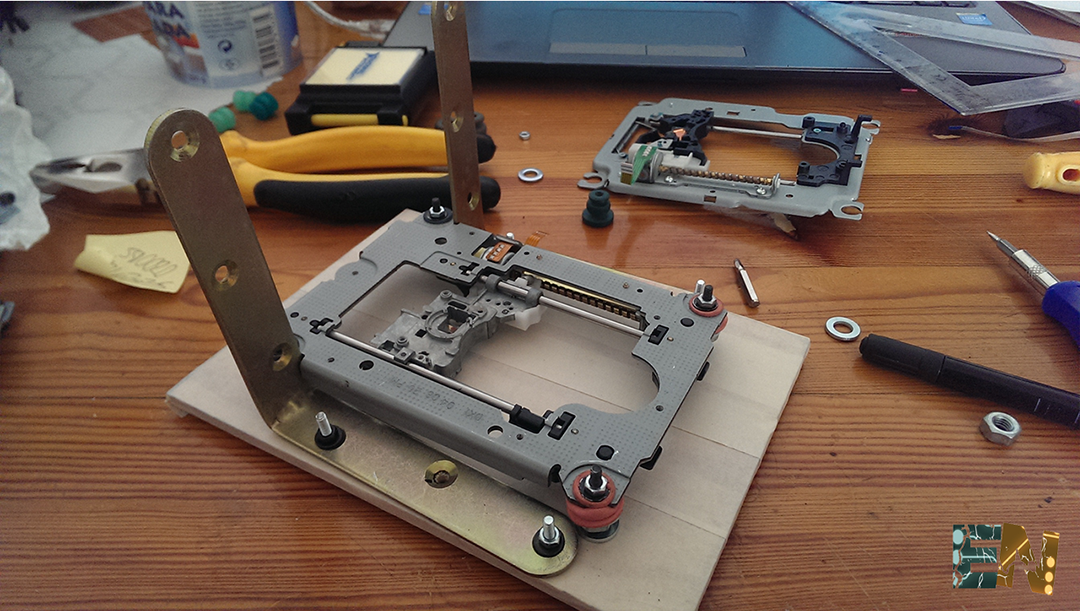
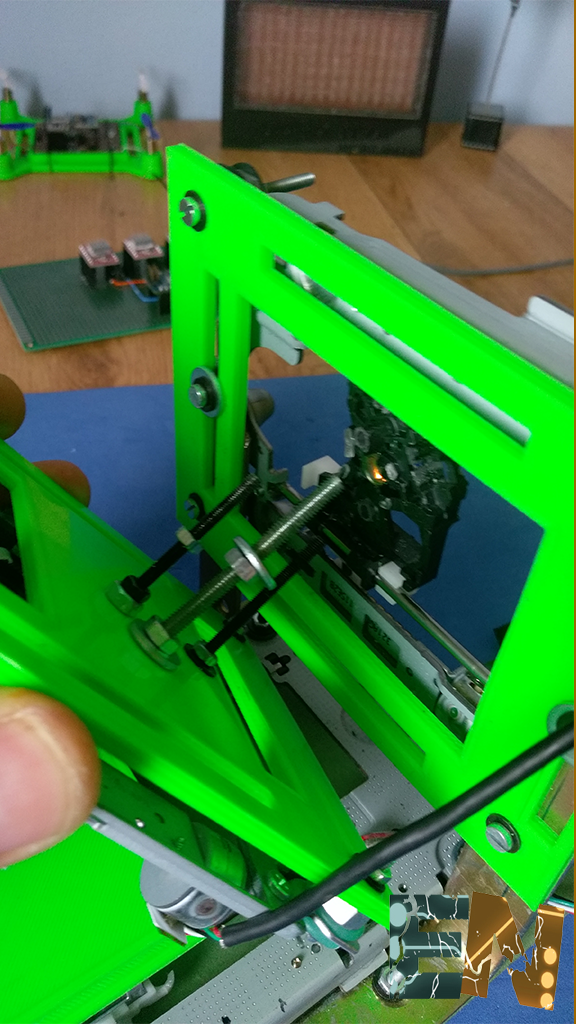
El siguiente paso es añadir el eje "Z". Para eso vamos a utilizar dos angulos de 90 grados. Los atornillamos en su sitio tal como se observa en la siguiente imagen.
Para el siguiente paso debemos descargar e imprimir el archivo para el eje "X". Si no tienes una impresora 3D simplemente corte otra placa de madera con las dimensiones dadas arriba. Dicha placa se atornillara junto al eje "X" a los dos angulos de 90 grados.
Descarga el fichero .stl para el eje "X":
Como puede observar en la siguiente imágen se han hecho 3 agujeros en el eje "X" para poder añadir el eje "Z" que hará el movimiento de arriba para abajo.
Imprimimos ahora la placa para el eje "Z". SI no tienes impresora 3D tendras que cortar una tabla de madera también. Atornillamos los 3 tornillos y los introducimos en los 3 agujeros hechos previamente.
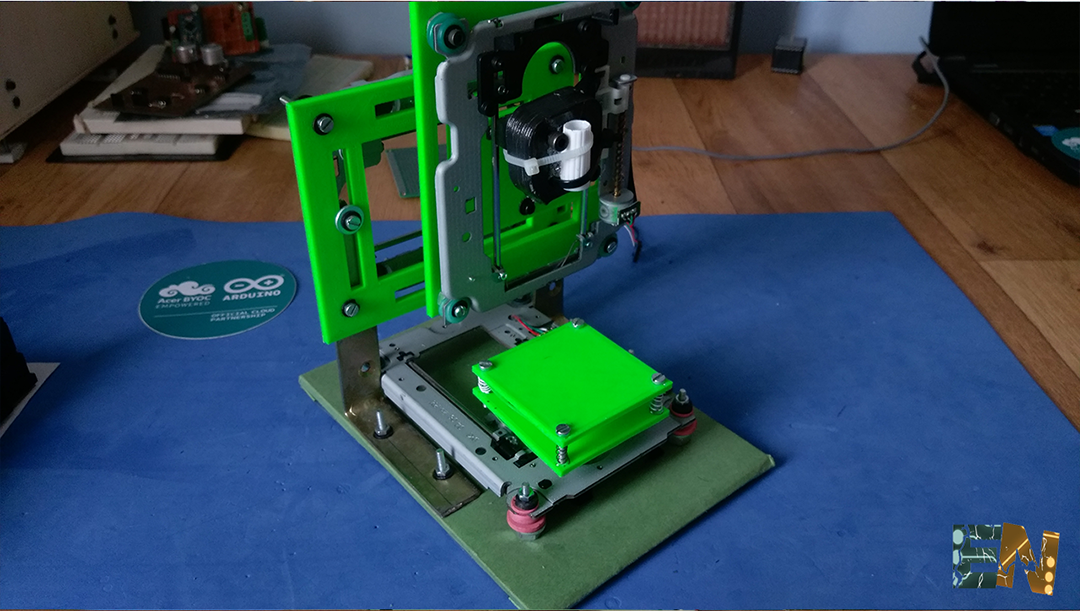
Ya estamos listos. Imprimimos o confeccionamos la doble tabla del eje "Y" donde se hará la impresión, añadimos un tapón de un boligrafo en el eje "Z" y ya estamos listos. Pasaremos a continuación a la parte de electrónica.
Descarga el fichero .stl para el eje "Z":
Descarga el fichero .stl para la tabla de impresión:
Ya tenemos la parte fisica montada. Pasamos ahora a la parte de elctronica. Antes de programar debemos montar el circuito para la GRBL. A continuación podeís mirar el esquemático completo utilizando un microcontrolador Arduino NANO, 3 controladores de motor paso a paso A4988 y pocos componentes extra.
Descarga todos los esquemáticos aqui:
Esquemático controlador GRBL !
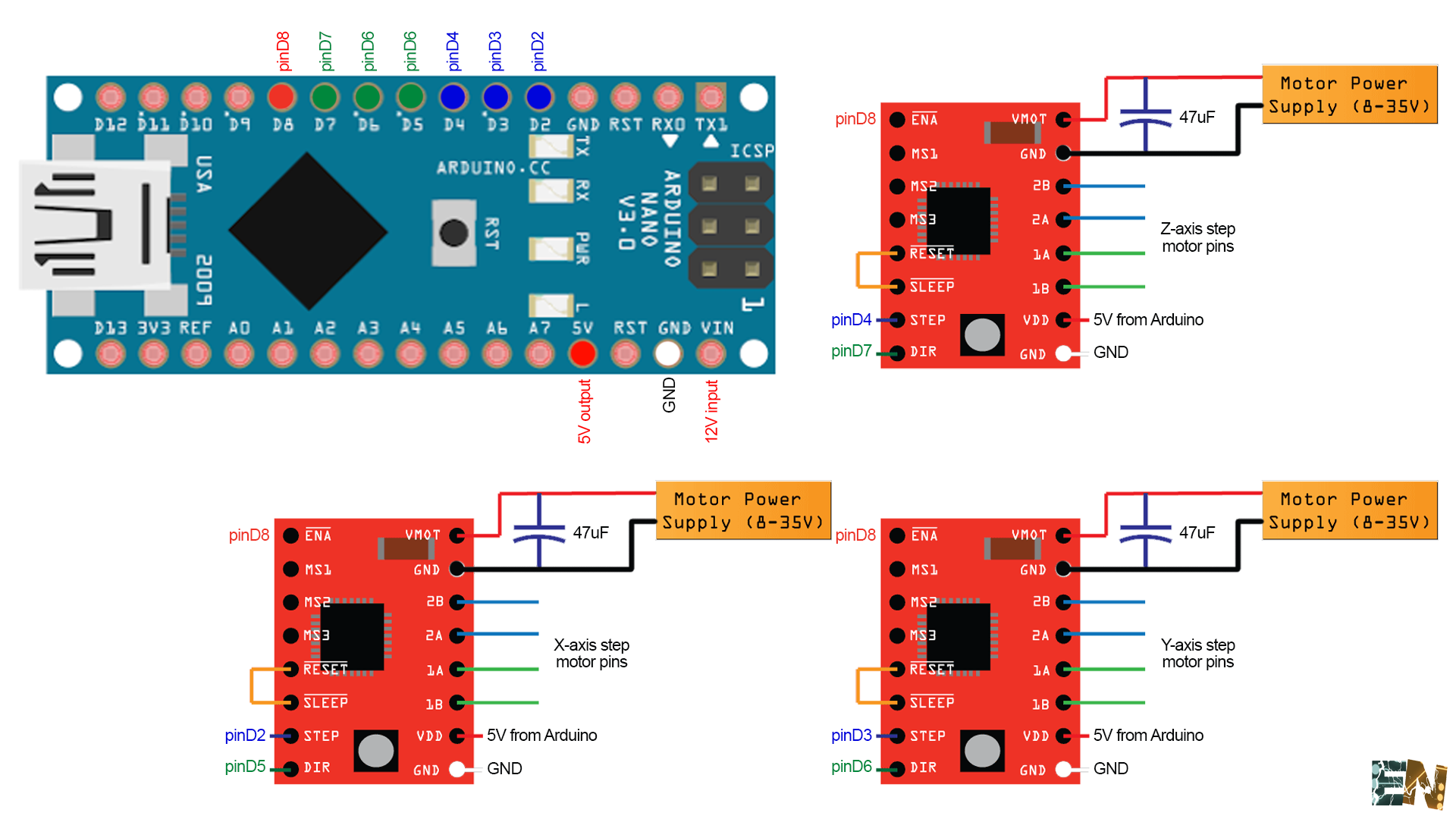
Utilizaremos los pines digitales 2, 3, y 4 para dar el número de pasos que deseamos que haga cada motor. Los pines digitales 5, 6 y 7 los usaremos para escoger la dirección de giro del motor. Con el pin digital 8 activaremos los motores. Alimentaremos el arduino a través de su pin de entrada Vin a 12 voltios. El arduino nano lleva un regulador de tensión a 5 voltios asi que no hay problema siemprer que no le aplicamos mas de 16 voltios en su entrada Vin. Alimentaremos los módulos a 12 voltios cada uno con una capacidad de 47uF entre Vin y GND que suministrará carga cuando sea necesaria. Cada motor paso a paso tiene 4 entradas. Entrada A1 con A2 y B1 con B2. Conectamos dichas entradas de los motores a nuestros módulos y ya estamos listos.
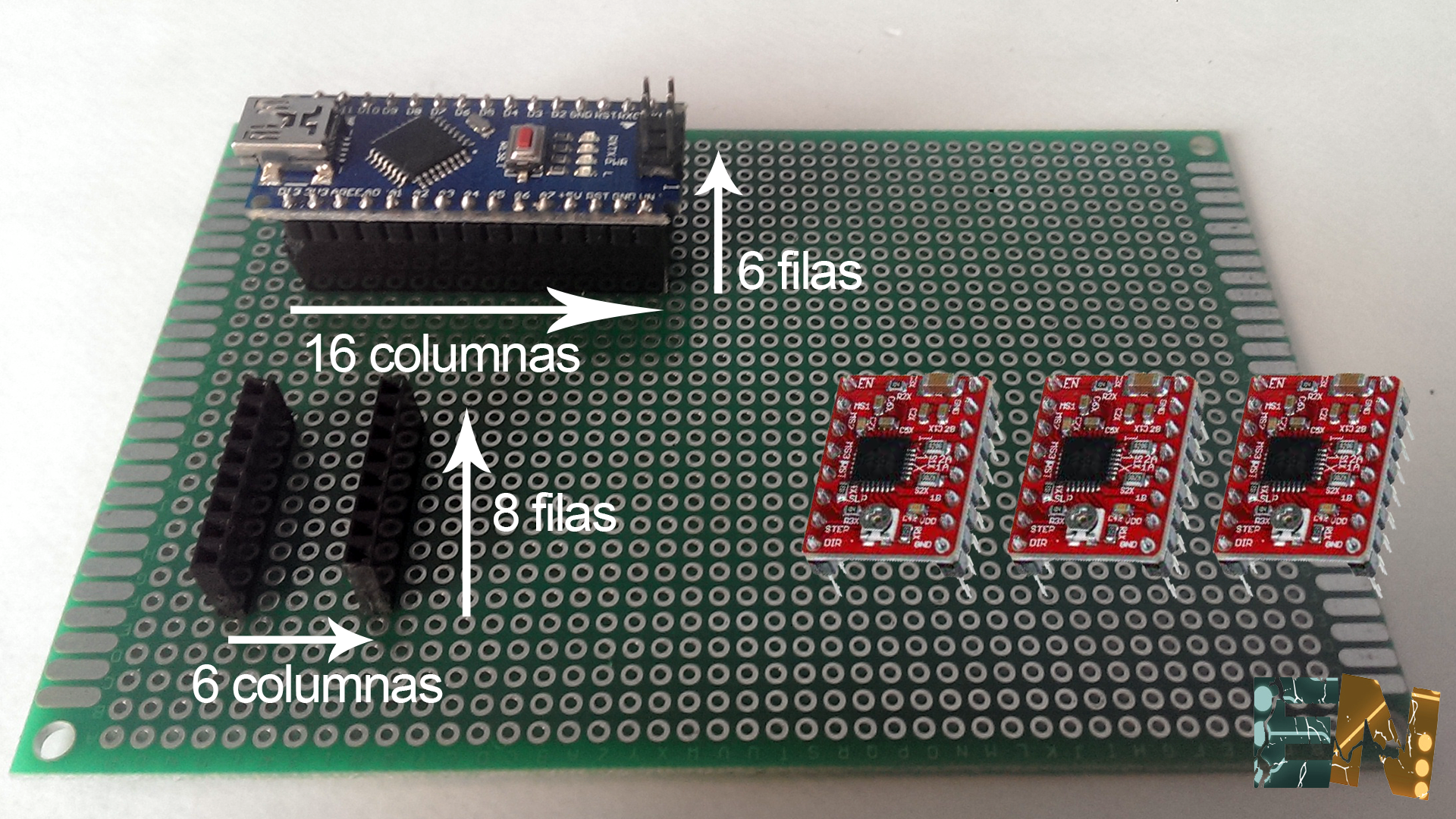
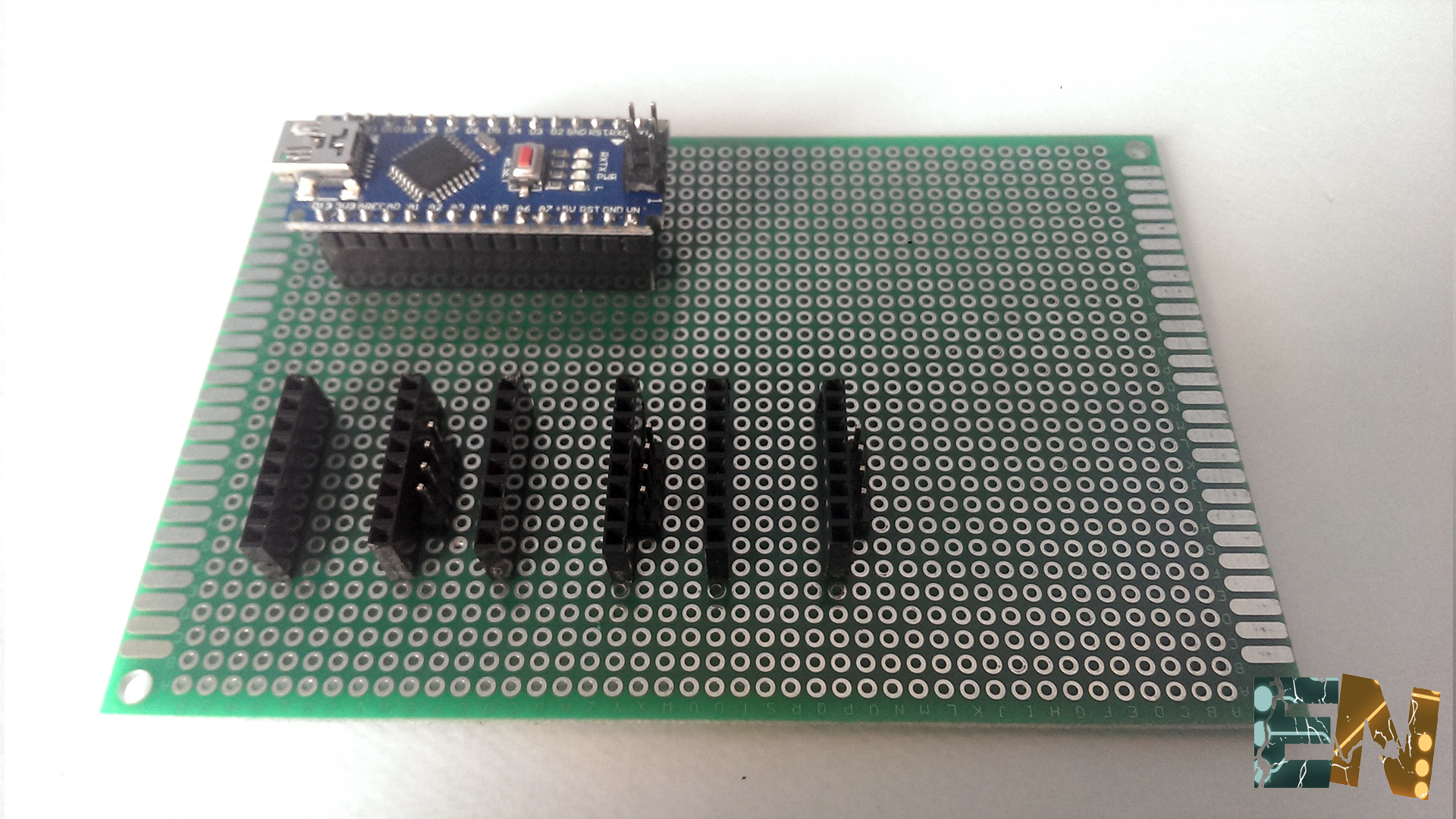
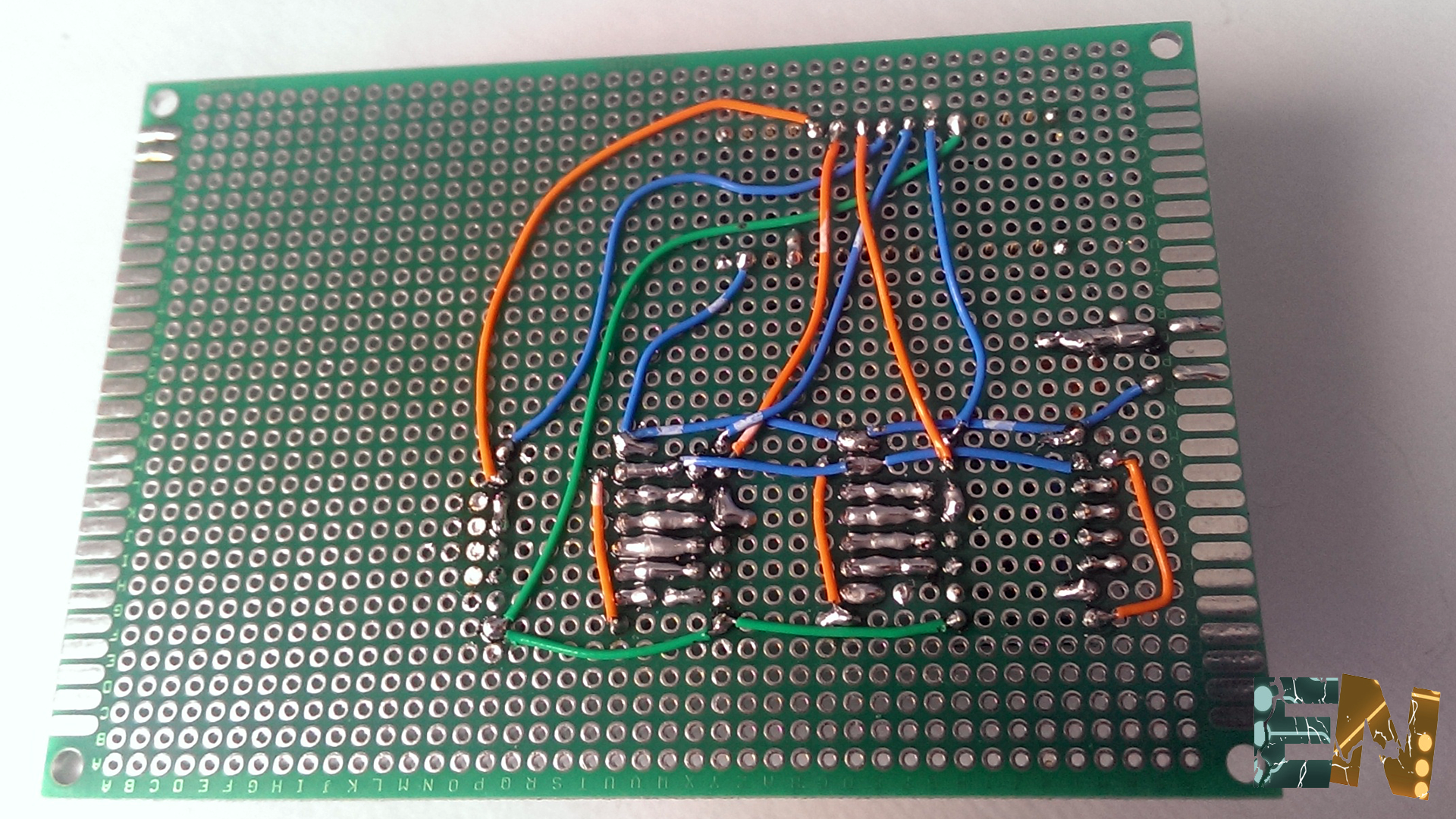
Observamos en la foto de arriba que utilizando una PCB de doble capa hemos añadido los pines hembra necesarios para conectar el arduino nano que tiene 26 pines, 13 de cada lado separados 6 filas entre si. Luego hemos empezado a añadir los pines hembra para un solo módulo A4988 que tiene 8 pines de cada lado separados 6 entre si. A continuación vamos a añadir 4 filas de pines hembra más para los otros dos módulos.
Observamos en la foto de arriba que no solo hemos añadido los pines hembra para los modulos sino que también 4 pines macho para cada salida hacia los motores A1, A2, B1 y B2.
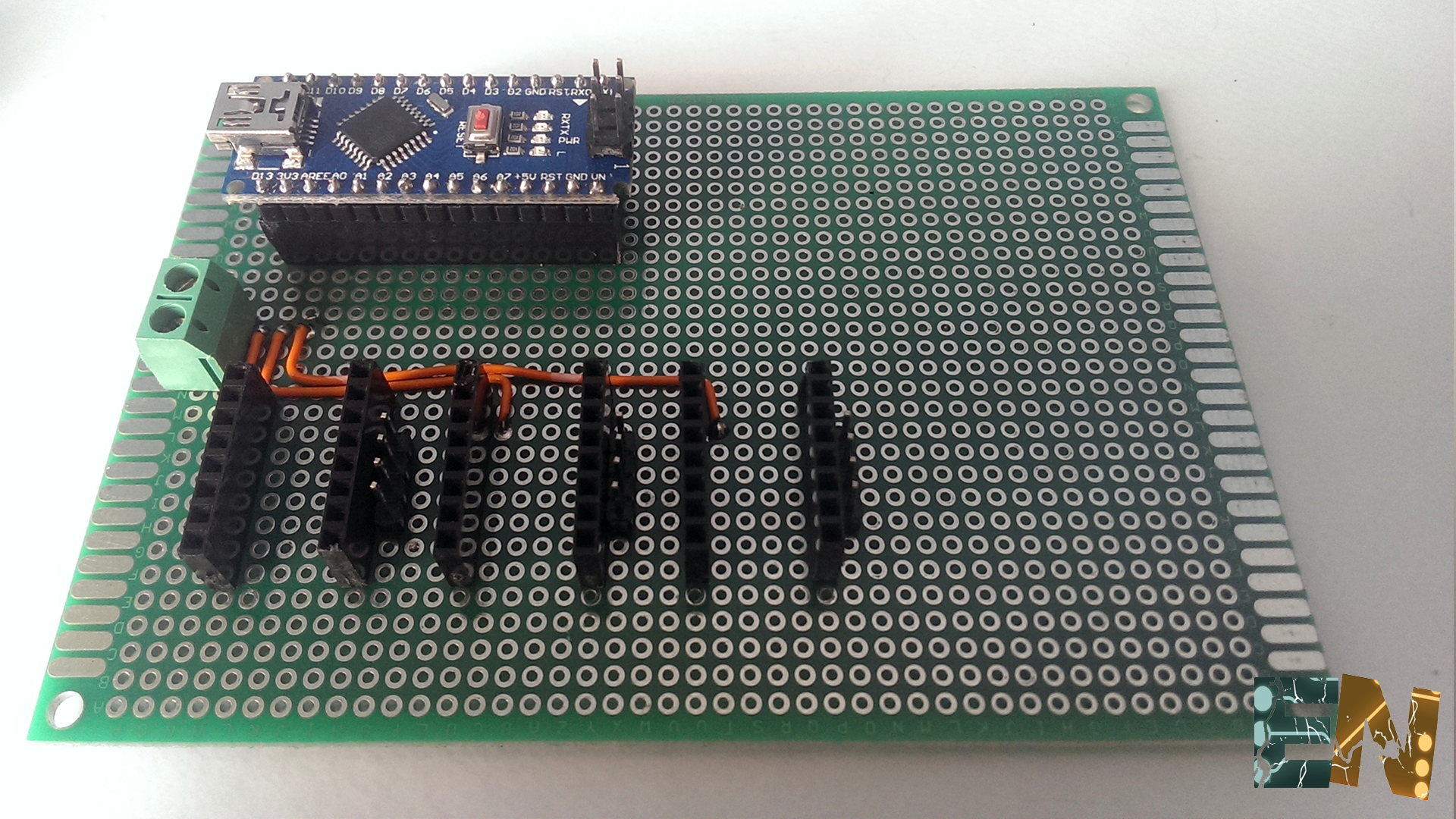
Hemos añadido un conector para la entrada de 12 voltios. Alimentamos con pequeños cables 12 voltios y tierra a los módulos y también al arduino. A continuación hacemos todo el conexionado según el esquematico utilizand cables y estaño de la manera mejor posible. Con mucho cuidado a la hora de alimentar los modulos A4988 ya que Vimot es de 12 voltios o más ya que es la tensión aplicada a los motores pero Vdd son 5 voltios desde el Arduino y esa será la tensión de funcionamiento interno del módulo.
Ya estamos listo para cargar nuestro programa GRBL al Arduino. Para eso cnectamos con USB el Arduino a un PC. De los links siguientes descargaremos 2 programas. EL primero sera Xloader que es el programa que utilizaremos para cargar el firmwere GRBL al arduino. Para eso debemos descargar el fichero .hex de abajo. Descargue los ficheros y pasamos al siguiente paso.
Descarga Xloader:
Descarga GRBL.hex:
Descarga universal G-code Sender 32-bit:
Descarga universal G-code Sender 64-bit:
Ya deberías tener los ficheros descargados y el arduino conectado al PC. EL siguiente paso es arrancar el programa XLoader
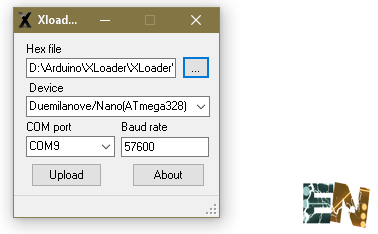
Una plataforma como la de la foto de arriba deberia aparecer. Apretamos los tres puntos suspensivos y buscamos el archivo GRBL.hex que acabamos de descargar. Entes de eso lo deberíamos desarchivar. Abrimos el archivo .hex con el Xloader. Como modelo escojemos arduino Demilanove/nano ya que es el que usamos. Escojemos el COM. En mi caso mi PC ha asignado mi arduino en el COM9. Apretamos subir y observamos como los leds de TX y RX del bus serial del Arduino empiezan a parpadear. Una vez se ha subido el programa ya estamos listos para enviar codigo G. Para eso utilizaremos el siguiente programa que heemos descargado que es el Universal G-code Sender. Conectamos los 3 motores a la PCB de manera correcta. Alimentamos la placa con 12 voltios y conectamos el USB al arduino. Arrancamos el Universal G-code Sender.
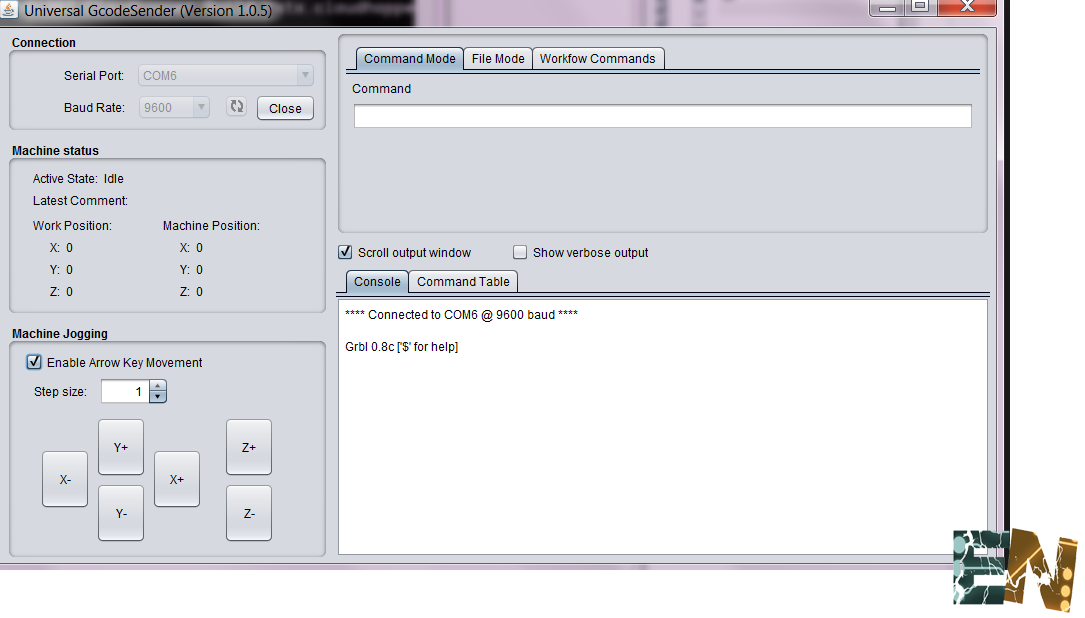
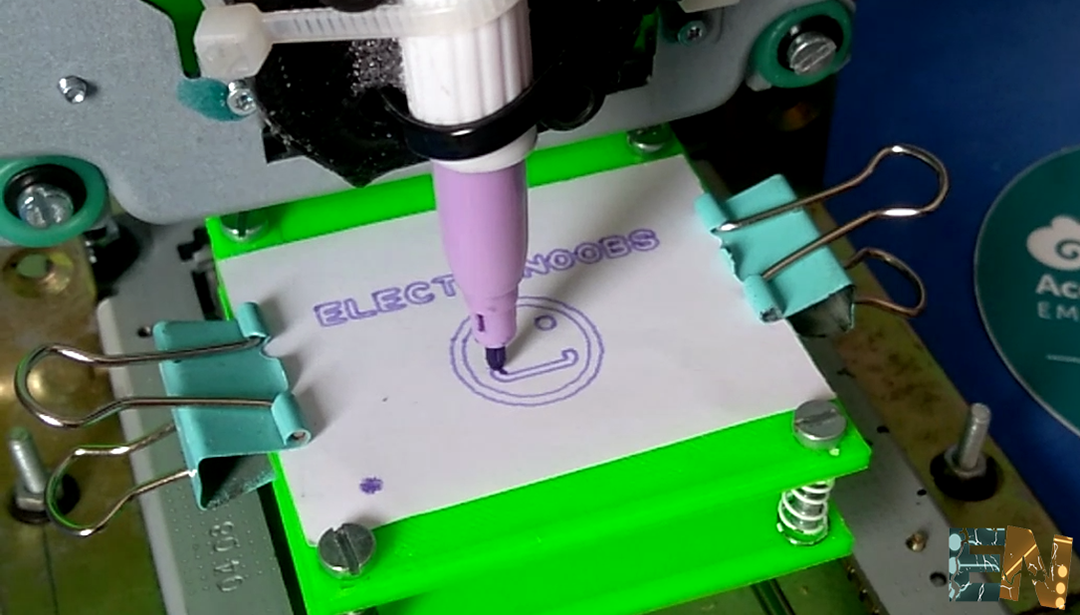
En el apartado del conexión seleccionamos el COM y apretamos abrir. Observaremos en la consola como se ha generado una comunicación con nuestro arduino. En este momento si empezamos tocando los botones para el control manual los motores deberian moverse. Para hacer una prueba vamos al modo fichero (file mode) y abrimos el siguiente fichero de ejemplo.gcode. Lo abrimos y apretamos enviar y veremos como la maquina empezara a dibujarlo. No se olviden de añadir un pequeño papel y un boligrafo para realizar el dibujo.
Descarga el ejemplo.gcode:
Ver otro tutorial aquí: