Get the code from below. Arduino IDE should have all those libraries. Just compile and uplaod it to the Arduino MEGA. Select MEGA board and the COM. Then connect the App and thest the robot. You might need to change the home position values for each servo so make some tests and change tose valeus in the code as you can see below.
#include <SoftwareSerial.h> // We use software serial on pins D12 and D8 for HC06
SoftwareSerial Bluetooth(12, 9); // Arduino RX 12 and TX 9 -> HC-06 Bluetooth TX RX
#include <Servo.h> //We will use servo library
//Variables
int Received = 0; //here we store the received byte number from Bluetooth
int DELAY = 5; //Delay in ms for the main loop, the bigger, the slower will the robot move
int MODE = 0; //Start mode is 0, so all motors -> home position
bool Impair_start = false; //In order to add phase rotation between legs, we use this variable
int FM1 = 0; //The leg movement loop has different stages
int FM2 = 0; //Each of these variables will be used in those stages
int FM3 = 0; //We use these as counters to count degrees
int FM4 = 0; //...
int FM5 = 0; //...
int FM6 = 0; //...
int FM7 = 0; //...
int FM8 = 0; //...
/*/////////////////Initial home position in degrees//////////////////
The first leg is the front left leg as seen from the front
Thew first motor of each leg is the one closer to the robot body*/
int home_Leg1_Mot1 = 75;
int home_Leg1_Mot2 = 90;
int home_Leg1_Mot3 = 100;
int home_Leg2_Mot1 = 70;
int home_Leg2_Mot2 = 90;
int home_Leg2_Mot3 = 115;
int home_Leg3_Mot1 = 70;
int home_Leg3_Mot2 = 90;
int home_Leg3_Mot3 = 100;
int home_Leg4_Mot1 = 105;
int home_Leg4_Mot2 = 90;
int home_Leg4_Mot3 = 110;
int home_Leg5_Mot1 = 75;
int home_Leg5_Mot2 = 90;
int home_Leg5_Mot3 = 90;
int home_Leg6_Mot1 = 110;
int home_Leg6_Mot2 = 100;
int home_Leg6_Mot3 = 115;
/*/////////////////////////////////////////////////////////////////*/
/*//////////////////////Declare the Servos/////////////////////////*/
Servo Leg1_Mot1, Leg1_Mot2, Leg1_Mot3; //Motors 1,2 and 3 of leg 1
Servo Leg2_Mot1, Leg2_Mot2, Leg2_Mot3; //Motors 1,2 and 3 of leg 2
Servo Leg3_Mot1, Leg3_Mot2, Leg3_Mot3; //Motors 1,2 and 3 of leg 3
Servo Leg4_Mot1, Leg4_Mot2, Leg4_Mot3; //Motors 1,2 and 3 of leg 4
Servo Leg5_Mot1, Leg5_Mot2, Leg5_Mot3; //Motors 1,2 and 3 of leg 5
Servo Leg6_Mot1, Leg6_Mot2, Leg6_Mot3; //Motors 1,2 and 3 of leg 6
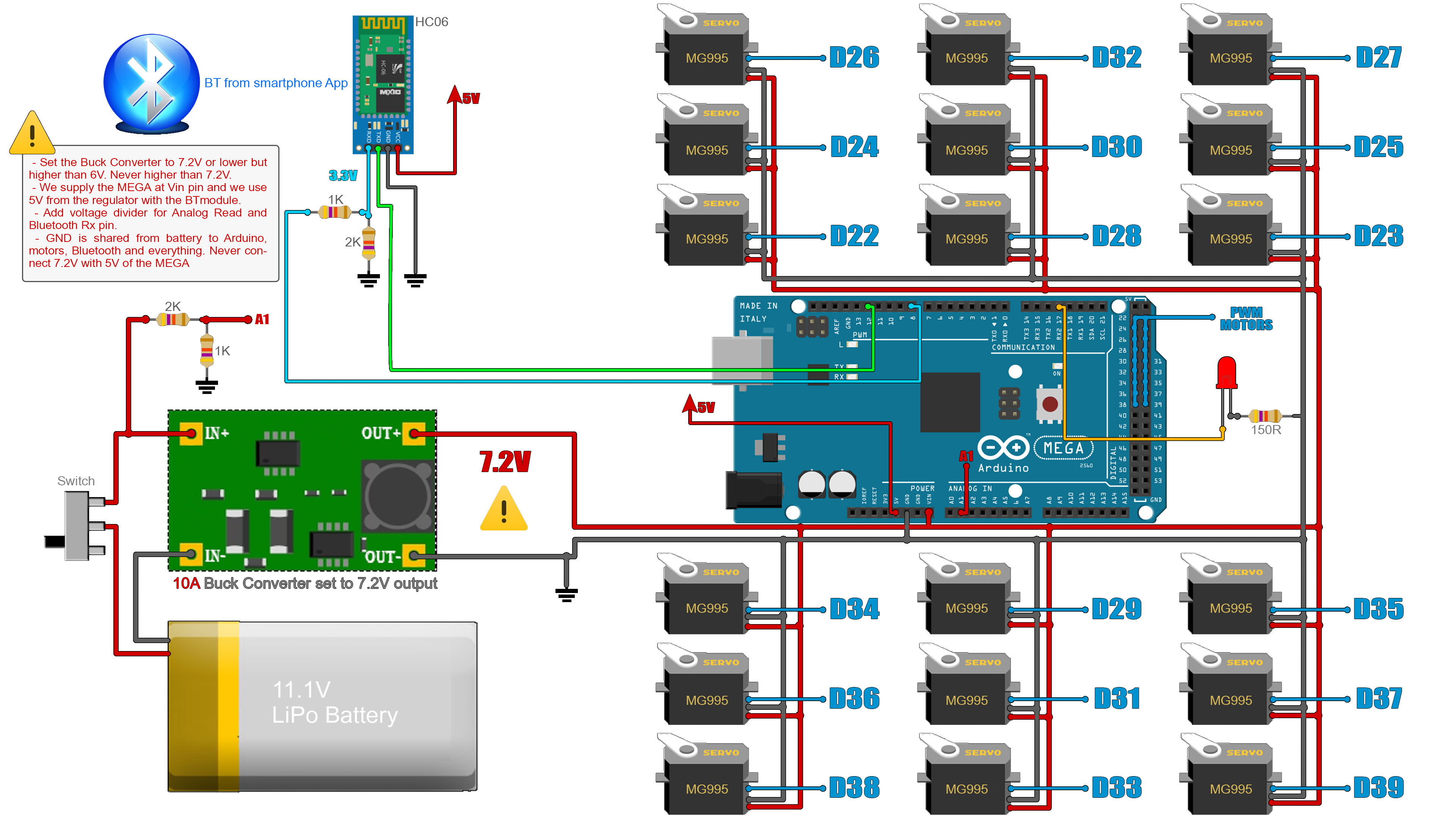
int LED = 17;
int bat = A1;
/*/////////////////////////////////////////////////////////////////*/
void setup() {
Serial.begin(9600); //We use the Arduino monitopr for debug...
Bluetooth.begin(9600); // My default baud rate of the HC06, yours can be different
pinMode(LED, OUTPUT);
pinMode(bat, INPUT);
digitalWrite(LED, LOW);
//Select digital pins of the MEGA for each motro
Leg1_Mot1.attach(35);
Leg1_Mot2.attach(37);
Leg1_Mot3.attach(39);
Leg2_Mot1.attach(29);
Leg2_Mot2.attach(31);
Leg2_Mot3.attach(33);
Leg3_Mot1.attach(34);
Leg3_Mot2.attach(36);
Leg3_Mot3.attach(38);
Leg4_Mot1.attach(26);
Leg4_Mot2.attach(24);
Leg4_Mot3.attach(22);
Leg5_Mot1.attach(32);
Leg5_Mot2.attach(30);
Leg5_Mot3.attach(28);
Leg6_Mot1.attach(27);
Leg6_Mot2.attach(25);
Leg6_Mot3.attach(23);
/*/////////////////////////////////////////////////////////////////*/
set_home_pos(); //Home all motors
}
void loop() {
/*Battery is 12.6V fully charged. We want to enable the LED when battery is below 8.5V.
Divider is 1k/3K so 0.33 * 8.5 = 2.83 volts -> in 10 bits = 580
*/
if(analogRead(bat) < 580)
{
digitalWrite(LED, HIGH);
}
else
{
digitalWrite(LED, LOW);
}
if(Bluetooth.available()>0) //If we receive somethin, we enter this loop
{
Received = Bluetooth.read(); //We store the received byte number
//Serial.println(Received); //Print for debug...
if (Received == 0) //If we receive the "0" number, mode = 1
{
MODE = 0; //Change mode to 0 (home position)
Impair_start = false; //Reset variables
FM1 = 0; //Reset values...
FM2 = 0; //Reset values...
FM3 = 0; //Reset values...
FM4 = 0; //Reset values...
FM5 = 0; //Reset values...
FM6 = 0; //Reset values...
FM7 = 0; //Reset values...
FM8 = 0; //Reset values...
}
if (Received == 1) //If we receive a 1, change mode to 1 and so on...
{
MODE = 1;
}
if (Received == 2)
{
MODE = 2;
}
if (Received == 3)
{
MODE = 3;
}
if (Received == 4)
{
MODE = 4;
}
if (Received == 5)
{
MODE = 5;
}
if (Received == 6)
{
MODE = 6;
}
/*If the received number is higher than 11, then we receive the values from slider
this will change the speed of movement by changing the delay of the loop*/
if (Received >= 12)
{
DELAY = map(Received,15,100,5,80); //Map delay from 5 to 80 ms
}
}
//Home position
if(MODE == 0){
set_home_pos();
}
//Move Forward
if(MODE == 1){
move_frwd();
}
//Move Backwards
if(MODE == 2){
move_bwd();
}
//Move Right
if(MODE == 3){
move_right();
}
//Move Left
if(MODE == 4){
move_left();
}
//Rotate Left
if(MODE == 5){
rotate_left();
}
//Rotate Right
if(MODE == 6){
rotate_right();
}
delay(DELAY); //Add delay of the loop, this will control the speed
}
/////////////////////////////SET HOME POSITION
void set_home_pos()
{
Leg1_Mot1.write(home_Leg1_Mot1);
Leg1_Mot2.write(home_Leg1_Mot2);
Leg1_Mot3.write(home_Leg1_Mot3);
Leg2_Mot1.write(home_Leg2_Mot1);
Leg2_Mot2.write(home_Leg2_Mot2);
Leg2_Mot3.write(home_Leg2_Mot3);
Leg3_Mot1.write(home_Leg3_Mot1);
Leg3_Mot2.write(home_Leg3_Mot2);
Leg3_Mot3.write(home_Leg3_Mot3);
Leg4_Mot1.write(home_Leg4_Mot1);
Leg4_Mot2.write(home_Leg4_Mot2);
Leg4_Mot3.write(home_Leg4_Mot3);
Leg5_Mot1.write(home_Leg5_Mot1);
Leg5_Mot2.write(home_Leg5_Mot2);
Leg5_Mot3.write(home_Leg5_Mot3);
Leg6_Mot1.write(home_Leg6_Mot1);
Leg6_Mot2.write(home_Leg6_Mot2);
Leg6_Mot3.write(home_Leg6_Mot3);
}
/////////////////////////////MOVE FORWARD
void move_frwd(){
//Impair Lift 10 deg
if (FM1 <=10){
Leg1_Mot2.write(home_Leg1_Mot2 - FM1);
Leg1_Mot3.write(home_Leg1_Mot3 - FM1);
Leg3_Mot2.write(home_Leg3_Mot2 - FM1);
Leg3_Mot3.write(home_Leg3_Mot3 - FM1);
Leg5_Mot2.write(home_Leg5_Mot2 - FM1);
Leg5_Mot3.write(home_Leg5_Mot3 - FM1);
FM1++;
}
//Impair rote fwd 30 deg
if (FM2 <= 30)
{
Leg1_Mot1.write(home_Leg1_Mot1 - FM2);
Leg3_Mot1.write(home_Leg3_Mot1 - FM2);
Leg5_Mot1.write(home_Leg5_Mot1 + FM2);
FM2++;
}
//Impair touch ground -10 deg
if (FM2 > 20 && FM3 <=10){
Leg1_Mot2.write(home_Leg1_Mot2 + FM3);
Leg1_Mot3.write(home_Leg1_Mot3 + FM3);
Leg3_Mot2.write(home_Leg3_Mot2 + FM3);
Leg3_Mot3.write(home_Leg3_Mot3 + FM3);
Leg5_Mot2.write(home_Leg5_Mot2 + FM3);
Leg5_Mot3.write(home_Leg5_Mot3 + FM3);
FM3++;
}
//Impair rotate bwd -30 deg
if (FM2 >= 30)
{
Leg1_Mot1.write(home_Leg1_Mot1 + FM4);
Leg3_Mot1.write(home_Leg3_Mot1 + FM4);
Leg5_Mot1.write(home_Leg5_Mot1 - FM4);
FM4++;
Impair_start = true;
}
if(FM4 >= 30) {
FM1 = 0;
FM2 = 0;
FM3 = 0;
FM4 = 0;
}
//////////////////////////////////
if (Impair_start){
//Pair Lift 10 deg
if (FM5 <=10){
Leg2_Mot2.write(home_Leg2_Mot2 - FM5);
Leg2_Mot3.write(home_Leg2_Mot3 - FM5);
Leg4_Mot2.write(home_Leg4_Mot2 - FM5);
Leg4_Mot3.write(home_Leg4_Mot3 - FM5);
Leg6_Mot2.write(home_Leg6_Mot2 - FM5);
Leg6_Mot3.write(home_Leg6_Mot3 - FM5);
FM5++;
}
//Pair rote fwd 30 deg
if (FM6 <= 30)
{
Leg2_Mot1.write(home_Leg2_Mot1 - FM6);
Leg4_Mot1.write(home_Leg4_Mot1 + FM6);
Leg6_Mot1.write(home_Leg6_Mot1 + FM6);
FM6++;
}
//Pair touch ground -10 deg
if (FM6 > 20 && FM7 <=10){
Leg2_Mot2.write(home_Leg2_Mot2 + FM7);
Leg2_Mot3.write(home_Leg2_Mot3 + FM7);
Leg4_Mot2.write(home_Leg4_Mot2 + FM7);
Leg4_Mot3.write(home_Leg4_Mot3 + FM7);
Leg6_Mot2.write(home_Leg6_Mot2 + FM7);
Leg6_Mot3.write(home_Leg6_Mot3 + FM7);
FM7++;
}
//Pair rotate bwd -30 deg
if (FM6 >= 30)
{
Leg2_Mot1.write(home_Leg2_Mot1 + FM8);
Leg4_Mot1.write(home_Leg4_Mot1 - FM8);
Leg6_Mot1.write(home_Leg6_Mot1 - FM8);
FM8++;
}
if(FM8 >= 30) {
Impair_start = false;
FM5 = 0;
FM6 = 0;
FM7 = 0;
FM8 = 0;
}
}
}//End Move Forward
/////////////////////////////MOVE Backwards
void move_bwd(){
//Impair Lift 10 deg
if (FM1 <=10){
Leg1_Mot2.write(home_Leg1_Mot2 - FM1);
Leg1_Mot3.write(home_Leg1_Mot3 - FM1);
Leg3_Mot2.write(home_Leg3_Mot2 - FM1);
Leg3_Mot3.write(home_Leg3_Mot3 - FM1);
Leg5_Mot2.write(home_Leg5_Mot2 - FM1);
Leg5_Mot3.write(home_Leg5_Mot3 - FM1);
FM1++;
}
//Impair rote fwd 30 deg
if (FM2 <= 30)
{
Leg1_Mot1.write(home_Leg1_Mot1 + FM2);
Leg3_Mot1.write(home_Leg3_Mot1 + FM2);
Leg5_Mot1.write(home_Leg5_Mot1 - FM2);
FM2++;
}
//Impair touch ground -10 deg
if (FM2 > 20 && FM3 <=10){
Leg1_Mot2.write(home_Leg1_Mot2 + FM3);
Leg1_Mot3.write(home_Leg1_Mot3 + FM3);
Leg3_Mot2.write(home_Leg3_Mot2 + FM3);
Leg3_Mot3.write(home_Leg3_Mot3 + FM3);
Leg5_Mot2.write(home_Leg5_Mot2 + FM3);
Leg5_Mot3.write(home_Leg5_Mot3 + FM3);
FM3++;
}
//Impair rotate bwd -30 deg
if (FM2 >= 30)
{
Leg1_Mot1.write(home_Leg1_Mot1 - FM4);
Leg3_Mot1.write(home_Leg3_Mot1 - FM4);
Leg5_Mot1.write(home_Leg5_Mot1 + FM4);
FM4++;
Impair_start = true;
}
if(FM4 >= 30) {
FM1 = 0;
FM2 = 0;
FM3 = 0;
FM4 = 0;
}
//////////////////////////////////
if (Impair_start){
//Pair Lift 10 deg
if (FM5 <=10){
Leg2_Mot2.write(home_Leg2_Mot2 - FM5);
Leg2_Mot3.write(home_Leg2_Mot3 - FM5);
Leg4_Mot2.write(home_Leg4_Mot2 - FM5);
Leg4_Mot3.write(home_Leg4_Mot3 - FM5);
Leg6_Mot2.write(home_Leg6_Mot2 - FM5);
Leg6_Mot3.write(home_Leg6_Mot3 - FM5);
FM5++;
}
//Pair rote fwd 30 deg
if (FM6 <= 30)
{
Leg2_Mot1.write(home_Leg2_Mot1 + FM6);
Leg4_Mot1.write(home_Leg4_Mot1 - FM6);
Leg6_Mot1.write(home_Leg6_Mot1 - FM6);
FM6++;
}
//Pair touch ground -10 deg
if (FM6 > 20 && FM7 <=10){
Leg2_Mot2.write(home_Leg2_Mot2 + FM7);
Leg2_Mot3.write(home_Leg2_Mot3 + FM7);
Leg4_Mot2.write(home_Leg4_Mot2 + FM7);
Leg4_Mot3.write(home_Leg4_Mot3 + FM7);
Leg6_Mot2.write(home_Leg6_Mot2 + FM7);
Leg6_Mot3.write(home_Leg6_Mot3 + FM7);
FM7++;
}
//Pair rotate bwd -30 deg
if (FM6 >= 30)
{
Leg2_Mot1.write(home_Leg2_Mot1 - FM8);
Leg4_Mot1.write(home_Leg4_Mot1 + FM8);
Leg6_Mot1.write(home_Leg6_Mot1 + FM8);
FM8++;
}
if(FM8 >= 30) {
FM5 = 0;
FM6 = 0;
FM7 = 0;
FM8 = 0;
}
}
}//End Move Backwards
/////////////////////////////Rotate Left
void rotate_left(){
//Impair Lift 10 deg
if (FM1 <=10){
Leg1_Mot2.write(home_Leg1_Mot2 - FM1);
Leg1_Mot3.write(home_Leg1_Mot3 - FM1);
Leg3_Mot2.write(home_Leg3_Mot2 - FM1);
Leg3_Mot3.write(home_Leg3_Mot3 - FM1);
Leg5_Mot2.write(home_Leg5_Mot2 - FM1);
Leg5_Mot3.write(home_Leg5_Mot3 - FM1);
FM1++;
}
//Impair rote fwd 30 deg
if (FM2 <= 30)
{
Leg1_Mot1.write(home_Leg1_Mot1 - FM2);
Leg3_Mot1.write(home_Leg3_Mot1 - FM2);
Leg5_Mot1.write(home_Leg5_Mot1 - FM2);
FM2++;
}
//Impair touch ground -10 deg
if (FM2 > 20 && FM3 <=10){
Leg1_Mot2.write(home_Leg1_Mot2 + FM3);
Leg1_Mot3.write(home_Leg1_Mot3 + FM3);
Leg3_Mot2.write(home_Leg3_Mot2 + FM3);
Leg3_Mot3.write(home_Leg3_Mot3 + FM3);
Leg5_Mot2.write(home_Leg5_Mot2 + FM3);
Leg5_Mot3.write(home_Leg5_Mot3 + FM3);
FM3++;
}
//Impair rotate bwd -30 deg
if (FM2 >= 30)
{
Leg1_Mot1.write(home_Leg1_Mot1 + FM4);
Leg3_Mot1.write(home_Leg3_Mot1 + FM4);
Leg5_Mot1.write(home_Leg5_Mot1 + FM4);
FM4++;
Impair_start = true;
}
if(FM4 >= 30) {
FM1 = 0;
FM2 = 0;
FM3 = 0;
FM4 = 0;
}
//////////////////////////////////
if (Impair_start){
//Pair Lift 10 deg
if (FM5 <=10){
Leg2_Mot2.write(home_Leg2_Mot2 - FM5);
Leg2_Mot3.write(home_Leg2_Mot3 - FM5);
Leg4_Mot2.write(home_Leg4_Mot2 - FM5);
Leg4_Mot3.write(home_Leg4_Mot3 - FM5);
Leg6_Mot2.write(home_Leg6_Mot2 - FM5);
Leg6_Mot3.write(home_Leg6_Mot3 - FM5);
FM5++;
}
//Pair rote fwd 30 deg
if (FM6 <= 30)
{
Leg2_Mot1.write(home_Leg2_Mot1 - FM6);
Leg4_Mot1.write(home_Leg4_Mot1 - FM6);
Leg6_Mot1.write(home_Leg6_Mot1 - FM6);
FM6++;
}
//Pair touch ground -10 deg
if (FM6 > 20 && FM7 <=10){
Leg2_Mot2.write(home_Leg2_Mot2 + FM7);
Leg2_Mot3.write(home_Leg2_Mot3 + FM7);
Leg4_Mot2.write(home_Leg4_Mot2 + FM7);
Leg4_Mot3.write(home_Leg4_Mot3 + FM7);
Leg6_Mot2.write(home_Leg6_Mot2 + FM7);
Leg6_Mot3.write(home_Leg6_Mot3 + FM7);
FM7++;
}
//Pair rotate bwd -30 deg
if (FM6 >= 30)
{
Leg2_Mot1.write(home_Leg2_Mot1 + FM8);
Leg4_Mot1.write(home_Leg4_Mot1 + FM8);
Leg6_Mot1.write(home_Leg6_Mot1 + FM8);
FM8++;
}
if(FM8 >= 30) {
Impair_start = false;
FM5 = 0;
FM6 = 0;
FM7 = 0;
FM8 = 0;
}
}
}//End Rotate Left
/////////////////////////////Rotate Right
void rotate_right(){
//Impair Lift 10 deg
if (FM1 <=10){
Leg1_Mot2.write(home_Leg1_Mot2 - FM1);
Leg1_Mot3.write(home_Leg1_Mot3 - FM1);
Leg3_Mot2.write(home_Leg3_Mot2 - FM1);
Leg3_Mot3.write(home_Leg3_Mot3 - FM1);
Leg5_Mot2.write(home_Leg5_Mot2 - FM1);
Leg5_Mot3.write(home_Leg5_Mot3 - FM1);
FM1++;
}
//Impair rote fwd 30 deg
if (FM2 <= 30)
{
Leg1_Mot1.write(home_Leg1_Mot1 + FM2);
Leg3_Mot1.write(home_Leg3_Mot1 + FM2);
Leg5_Mot1.write(home_Leg5_Mot1 + FM2);
FM2++;
}
//Impair touch ground -10 deg
if (FM2 > 20 && FM3 <=10){
Leg1_Mot2.write(home_Leg1_Mot2 + FM3);
Leg1_Mot3.write(home_Leg1_Mot3 + FM3);
Leg3_Mot2.write(home_Leg3_Mot2 + FM3);
Leg3_Mot3.write(home_Leg3_Mot3 + FM3);
Leg5_Mot2.write(home_Leg5_Mot2 + FM3);
Leg5_Mot3.write(home_Leg5_Mot3 + FM3);
FM3++;
}
//Impair rotate bwd -30 deg
if (FM2 >= 30)
{
Leg1_Mot1.write(home_Leg1_Mot1 - FM4);
Leg3_Mot1.write(home_Leg3_Mot1 - FM4);
Leg5_Mot1.write(home_Leg5_Mot1 - FM4);
FM4++;
Impair_start = true;
}
if(FM4 >= 30) {
FM1 = 0;
FM2 = 0;
FM3 = 0;
FM4 = 0;
}
//////////////////////////////////
if (Impair_start){
//Pair Lift 10 deg
if (FM5 <=10){
Leg2_Mot2.write(home_Leg2_Mot2 - FM5);
Leg2_Mot3.write(home_Leg2_Mot3 - FM5);
Leg4_Mot2.write(home_Leg4_Mot2 - FM5);
Leg4_Mot3.write(home_Leg4_Mot3 - FM5);
Leg6_Mot2.write(home_Leg6_Mot2 - FM5);
Leg6_Mot3.write(home_Leg6_Mot3 - FM5);
FM5++;
}
//Pair rote fwd 30 deg
if (FM6 <= 30)
{
Leg2_Mot1.write(home_Leg2_Mot1 + FM6);
Leg4_Mot1.write(home_Leg4_Mot1 + FM6);
Leg6_Mot1.write(home_Leg6_Mot1 + FM6);
FM6++;
}
//Pair touch ground -10 deg
if (FM6 > 20 && FM7 <=10){
Leg2_Mot2.write(home_Leg2_Mot2 + FM7);
Leg2_Mot3.write(home_Leg2_Mot3 + FM7);
Leg4_Mot2.write(home_Leg4_Mot2 + FM7);
Leg4_Mot3.write(home_Leg4_Mot3 + FM7);
Leg6_Mot2.write(home_Leg6_Mot2 + FM7);
Leg6_Mot3.write(home_Leg6_Mot3 + FM7);
FM7++;
}
//Pair rotate bwd -30 deg
if (FM6 >= 30)
{
Leg2_Mot1.write(home_Leg2_Mot1 - FM8);
Leg4_Mot1.write(home_Leg4_Mot1 - FM8);
Leg6_Mot1.write(home_Leg6_Mot1 - FM8);
FM8++;
}
if(FM8 >= 30) {
FM5 = 0;
FM6 = 0;
FM7 = 0;
FM8 = 0;
}
}
}//End Rotate Right
/////////////////////////////Move Right
void move_right(){
//Impair Motor 2 -20 Motor 3 +20
if (FM1 <= 20){
Leg1_Mot2.write(home_Leg1_Mot2 + FM1);
Leg1_Mot3.write(home_Leg1_Mot3 + FM1);
Leg2_Mot2.write(home_Leg2_Mot2 + FM1);
Leg2_Mot3.write(home_Leg2_Mot3 - FM1*2);
Leg3_Mot2.write(home_Leg3_Mot2 + FM1);
Leg3_Mot3.write(home_Leg3_Mot3 + FM1);
Leg4_Mot2.write(home_Leg4_Mot2 - FM1);
Leg4_Mot3.write(home_Leg4_Mot3 + FM1*2);
Leg5_Mot2.write(home_Leg5_Mot2 + FM1);
Leg5_Mot3.write(home_Leg5_Mot3 - FM1);
Leg6_Mot2.write(home_Leg6_Mot2 - FM1);
Leg6_Mot3.write(home_Leg6_Mot3 + FM1*2);
FM1++;
}
if(FM1 >= 20 && FM2 <= 20){
Leg2_Mot2.write(home_Leg2_Mot2 + FM1 + FM2);
Leg2_Mot3.write(home_Leg2_Mot3 - FM1*2 + FM2*2);
Leg4_Mot2.write(home_Leg4_Mot2 - FM1 + FM2);
Leg4_Mot3.write(home_Leg4_Mot3 + FM1*2 - FM2*2);
Leg6_Mot2.write(home_Leg6_Mot2 - FM1 + FM2);
Leg6_Mot3.write(home_Leg6_Mot3 + FM1*2 - FM2*2);
FM2++;
}
if(FM2 >= 20 && FM3 <= 20){
Leg1_Mot2.write(home_Leg1_Mot2 + FM1 - FM3);
Leg1_Mot3.write(home_Leg1_Mot3 + FM1 - FM1);
Leg3_Mot2.write(home_Leg3_Mot2 + FM1 - FM3);
Leg3_Mot3.write(home_Leg3_Mot3 + FM1 - FM3);
Leg5_Mot2.write(home_Leg5_Mot2 + FM1 - FM3);
Leg5_Mot3.write(home_Leg5_Mot3 - FM1 + FM3);
FM3++;
}
if(FM3 >= 20){
FM1 = 0;
FM2 = 0;
FM3 = 0;
}
}
/////////////////////////////Move Left
void move_left(){
//Impair Motor 2 -20 Motor 3 +20
if (FM1 <= 20){
Leg4_Mot2.write(home_Leg4_Mot2 + FM1);
Leg4_Mot3.write(home_Leg4_Mot3 + FM1);
Leg5_Mot2.write(home_Leg5_Mot2 + FM1);
Leg5_Mot3.write(home_Leg5_Mot3 - FM1*2);
Leg6_Mot2.write(home_Leg6_Mot2 + FM1);
Leg6_Mot3.write(home_Leg6_Mot3 + FM1);
Leg3_Mot2.write(home_Leg4_Mot3 - FM1);
Leg3_Mot3.write(home_Leg4_Mot3 + FM1*2);
Leg2_Mot2.write(home_Leg2_Mot2 + FM1);
Leg2_Mot3.write(home_Leg2_Mot3 - FM1);
Leg1_Mot2.write(home_Leg1_Mot2 - FM1);
Leg1_Mot3.write(home_Leg1_Mot3 + FM1*2);
FM1++;
}
if(FM1 >= 20 && FM2 <= 20){
Leg5_Mot2.write(home_Leg5_Mot2 + FM1 + FM2);
Leg5_Mot3.write(home_Leg5_Mot3 - FM1*2 + FM2*2);
Leg3_Mot2.write(home_Leg3_Mot2 - FM1 + FM2);
Leg3_Mot3.write(home_Leg3_Mot3 + FM1*2 - FM2*2);
Leg1_Mot2.write(home_Leg1_Mot2 - FM1 + FM2);
Leg1_Mot3.write(home_Leg1_Mot3 + FM1*2 - FM2*2);
FM2++;
}
if(FM2 >= 20 && FM3 <= 20){
Leg6_Mot2.write(home_Leg6_Mot2 + FM1 - FM3);
Leg6_Mot3.write(home_Leg6_Mot3 + FM1 - FM1);
Leg4_Mot2.write(home_Leg4_Mot2 + FM1 - FM3);
Leg4_Mot3.write(home_Leg4_Mot3 + FM1 - FM3);
Leg2_Mot2.write(home_Leg2_Mot2 + FM1 - FM3);
Leg2_Mot3.write(home_Leg2_Mot3 - FM1 + FM3);
FM3++;
}
if(FM3 >= 20){
FM1 = 0;
FM2 = 0;
FM3 = 0;
}
}