
This is the code for the Arduino based GPS distance meter. Make sure you also install the needed library for the GPS module. Download that from below. Install the library, compile and uplaod the code to the Arduino. Downlaod the zip file or copy+paste from below. Read all comments in the code!
#include <SoftwareSerial.h>
#include <TinyGPS.h>
/* This sample code demonstrates the normal use of a TinyGPS object.
It requires the use of SoftwareSerial, and assumes that you have a
4800-baud serial GPS device hooked up on pins 4(rx) and 3(tx).
Code: http://www.electronoobs.com/eng_arduino_tut87_code1.php
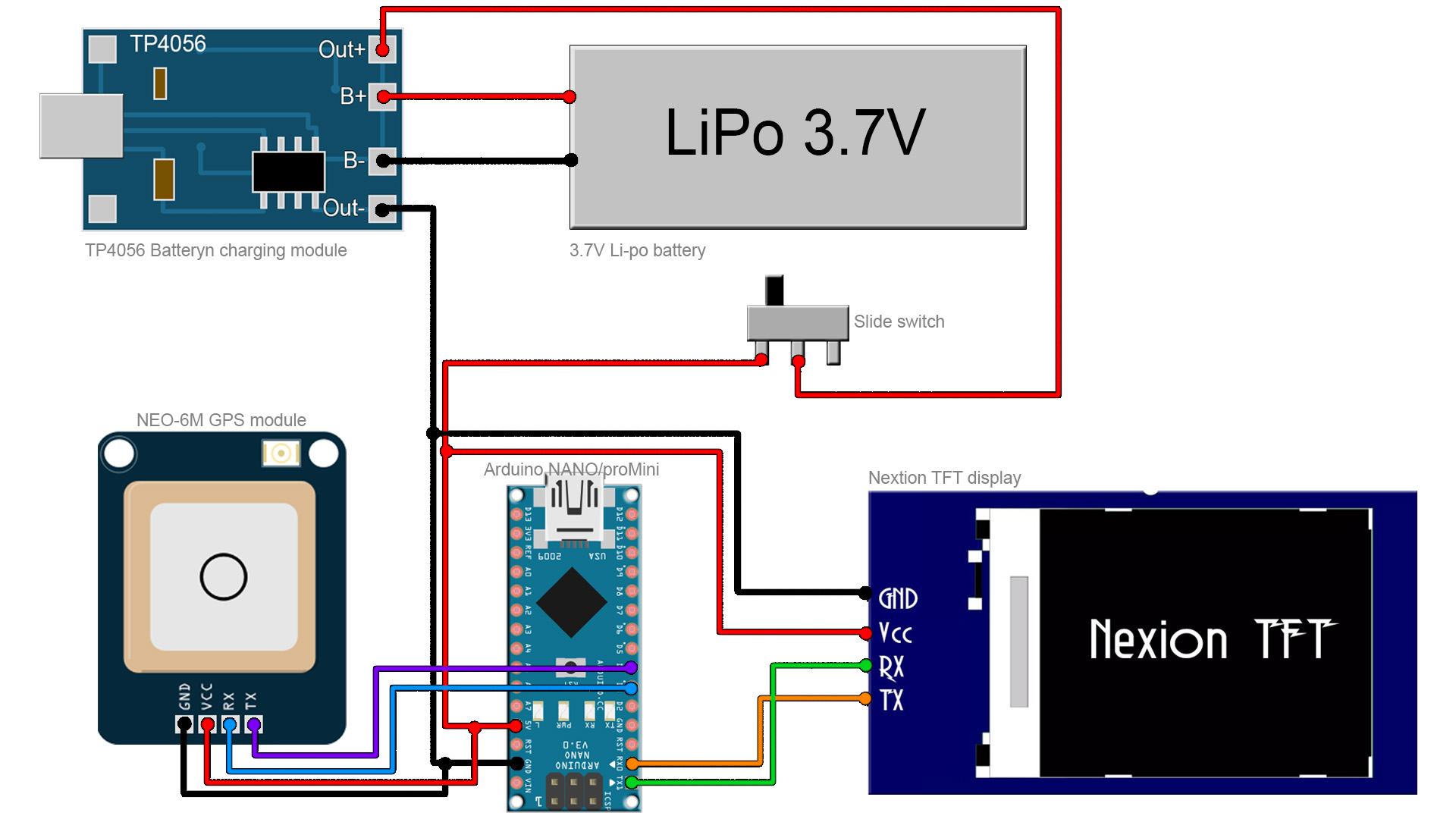
Schematic: http://www.electronoobs.com/eng_arduino_tut87_sch1.php
SUBSCRIBE: http://youtube.com/c/ELECTRONOOBS
*/
TinyGPS gps;
SoftwareSerial ss(4, 3);
int battery = A0;
static void smartdelay(unsigned long ms);
static void print_float(float val, float invalid, int len, int prec);
static void print_int(unsigned long val, unsigned long invalid, int len);
static void print_date(TinyGPS &gps);
static void print_str(const char *str, int len);
float start_lat, start_lon, flat, flon;
unsigned long age, date, time, chars = 0;
unsigned short sentences = 0, failed = 0;
int Altitude_S = 0;
int Altitude_F = 0;
int Altitude = 0;
void setup()
{
analogReference(INTERNAL); //Internal 1.1V reference
pinMode(battery, INPUT);
Serial.begin(115200);//or 9600
ss.begin(9600);
gps.f_get_position(&start_lat, &start_lon, &age);
}
void loop()
{
if(Serial.available()>0)
{
String Received = Serial.readString(); //Save the received String in the Received variable
if(int(Received[0]) == 0) //If the first character of "Received" is "0" //Distance start mode
{
gps.f_get_position(&start_lat, &start_lon, &age);
int latitude = start_lat;
int longitude = start_lon;
float lat_dec = (start_lat - latitude);
lat_dec = lat_dec * 1000000;
long lat_dec_int = long(lat_dec);
//lat_dec_int = abs(lat_dec_int);
float long_dec = start_lon - longitude;
long_dec = long_dec*1000000;
long long_dec_int = long(long_dec);
//long_dec_int = abs(long_dec_int);
Serial.print("log.txt="); //We print the "variable" we want to change on the screen
Serial.write(0x22);
Serial.print("START point coordinates are stored"); //Print the "value" we want to be displayed
Serial.write(0x22);
Serial.write(0xff); //Always add 3 full bytes after...
Serial.write(0xff);
Serial.write(0xff);
Serial.print("lat.val="); //Print the "variable" we want to change
Serial.print(latitude); //Print the "value" we want to be displayed
Serial.write(0xff); //Always add 3 full bytes after...
Serial.write(0xff);
Serial.write(0xff);
Serial.print("lat_dec.val="); //Print the "variable" we want to change
Serial.print(lat_dec_int); //Print the "value" we want to be displayed
Serial.write(0xff); //Always add 3 full bytes after...
Serial.write(0xff);
Serial.write(0xff);
Serial.print("long.val=");
Serial.print(longitude);
Serial.write(0xff);
Serial.write(0xff);
Serial.write(0xff);
Serial.print("long_dec.val=");
Serial.print(long_dec_int);
Serial.write(0xff);
Serial.write(0xff);
Serial.write(0xff);
smartdelay(1000);
}
if(int(Received[0]) == 1) //If the first character of "Received" is "1" //distance finish mode
{
gps.f_get_position(&flat, &flon, &age);
smartdelay(100);
int distance = TinyGPS::distance_between(flat, flon, start_lat, start_lon);
gps.f_get_position(&start_lat, &start_lon, &age);
Serial.print("distance.val="); //We print the "variable" we want to change on the screen
Serial.print(distance); //Print the "value" we want to be displayed
Serial.write(0xff); //Always add 3 full bytes after...
Serial.write(0xff);
Serial.write(0xff);
Serial.print("log.txt=");
Serial.write(0x22);
Serial.print("Distance between START and FINSIH was calculated");
Serial.write(0x22);
Serial.write(0xff);
Serial.write(0xff);
Serial.write(0xff);
smartdelay(1000);
gps.stats(&chars, &sentences, &failed);
}
if(int(Received[0]) == 2) //If the first character of "Received" is "2" //Altitude start mode
{
Altitude_S = gps.f_altitude();
Serial.print("log.txt=");
Serial.write(0x22);
Serial.print("Altitude START point was stored");
Serial.write(0x22);
Serial.write(0xff);
Serial.write(0xff);
Serial.write(0xff);
Serial.print("alt_s.val=");
Serial.print(Altitude_S);
Serial.write(0xff);
Serial.write(0xff);
Serial.write(0xff);
smartdelay(1000);
}
if(int(Received[0]) == 3) //If the first character of "Received" is "3" Altitude finish mode
{
Altitude_F = gps.f_altitude();
Altitude = Altitude_F - Altitude_S;
Serial.print("log.txt=");
Serial.write(0x22);
Serial.print("Altitude FINISH point was stored and altitude difference calculated");
Serial.write(0x22);
Serial.write(0xff);
Serial.write(0xff);
Serial.write(0xff);
Serial.print("alt_f.val=");
Serial.print(Altitude_F);
Serial.write(0xff);
Serial.write(0xff);
Serial.write(0xff);
Serial.print("altitude.val=");
Serial.print(Altitude);
Serial.write(0xff);
Serial.write(0xff);
Serial.write(0xff);
smartdelay(1000);
}
}//end if serial available
int battery_level = map(analogRead(battery),814,977,10,100);
battery_level = constrain(battery_level,10,100);
//977 analog read = 4.2V using a divider of R2=10K and R1=30K; 812 = 3.5V (low battery)
Serial.print("battery.val="); //We print the variable we want to cahnge on the screen
Serial.print(battery_level); //Print the value we want to be displayed
Serial.write(0xff); //Always add 3 full bytes after...
Serial.write(0xff);
Serial.write(0xff);
int satelites = gps.satellites();
if(satelites < 50)
{
Serial.print("satelites.val="); //We print the variable we want to cahnge on the screen
Serial.print(satelites); //Print the value we want to be displayed
Serial.write(0xff); //Always add 3 full bytes after...
Serial.write(0xff);
Serial.write(0xff);
}
smartdelay(1000);
}
//GPS functions. See TtinyGPS library example for more
static void smartdelay(unsigned long ms)
{
unsigned long start = millis();
do
{
while (ss.available())
gps.encode(ss.read());
} while (millis() - start < ms);
}
static void print_float(float val, float invalid, int len, int prec)
{
if (val == invalid)
{
while (len-- > 1)
Serial.print('*');
Serial.print(' ');
}
else
{
Serial.print(val, prec);
int vi = abs((int)val);
int flen = prec + (val < 0.0 ? 2 : 1); // . and -
flen += vi >= 1000 ? 4 : vi >= 100 ? 3 : vi >= 10 ? 2 : 1;
for (int i=flen; i<len; ++i)
Serial.print(' ');
}
smartdelay(0);
}
static void print_int(unsigned long val, unsigned long invalid, int len)
{
char sz[32];
if (val == invalid)
strcpy(sz, "*******");
else
sprintf(sz, "%ld", val);
sz[len] = 0;
for (int i=strlen(sz); i<len; ++i)
sz[i] = ' ';
if (len > 0)
sz[len-1] = ' ';
Serial.print(sz);
smartdelay(0);
}
static void print_date(TinyGPS &gps)
{
int year;
byte month, day, hour, minute, second, hundredths;
unsigned long age;
gps.crack_datetime(&year, &month, &day, &hour, &minute, &second, &hundredths, &age);
if (age == TinyGPS::GPS_INVALID_AGE)
Serial.print("********** ******** ");
else
{
char sz[32];
sprintf(sz, "%02d/%02d/%02d %02d:%02d:%02d ",
month, day, year, hour, minute, second);
Serial.print(sz);
}
print_int(age, TinyGPS::GPS_INVALID_AGE, 5);
smartdelay(0);
}
static void print_str(const char *str, int len)
{
int slen = strlen(str);
for (int i=0; i<len; ++i)
Serial.print(i<slen ? str[i] : ' ');
smartdelay(0);
}







