Ok, before we start, I have to say that this is far from the best gimbal project. But I hope this tutorial will at least teach you something about how gimbals work and how to build one. You will ahve all the schematics, codes and 3D files if you want to improve this project yourself. What I wanted is to make a project based on a Tarot commercial gimbal that also uses servos. But for now, the speed of this servos is too slow so I should use bigger gears and also improve a bit the PID code.
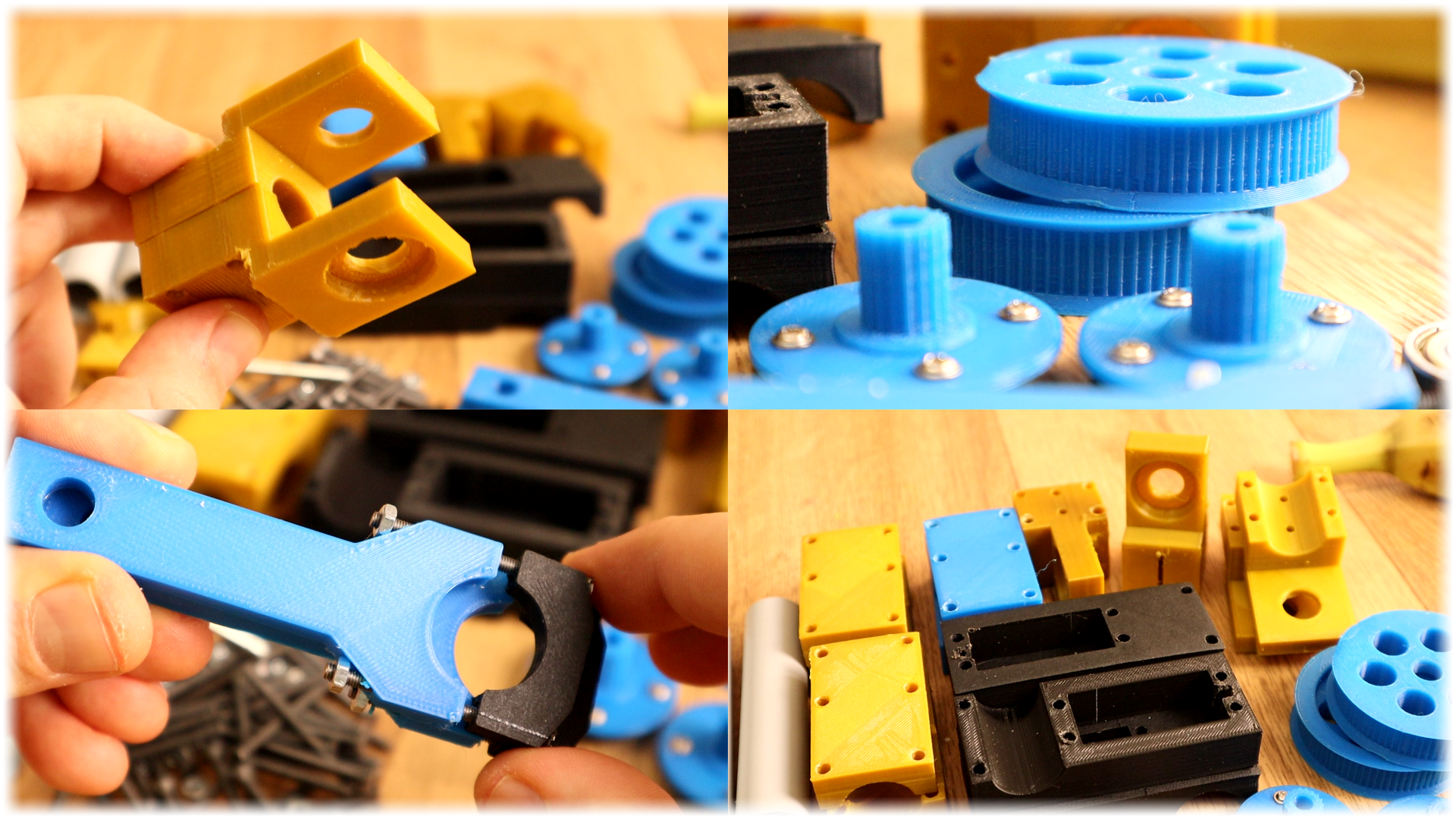
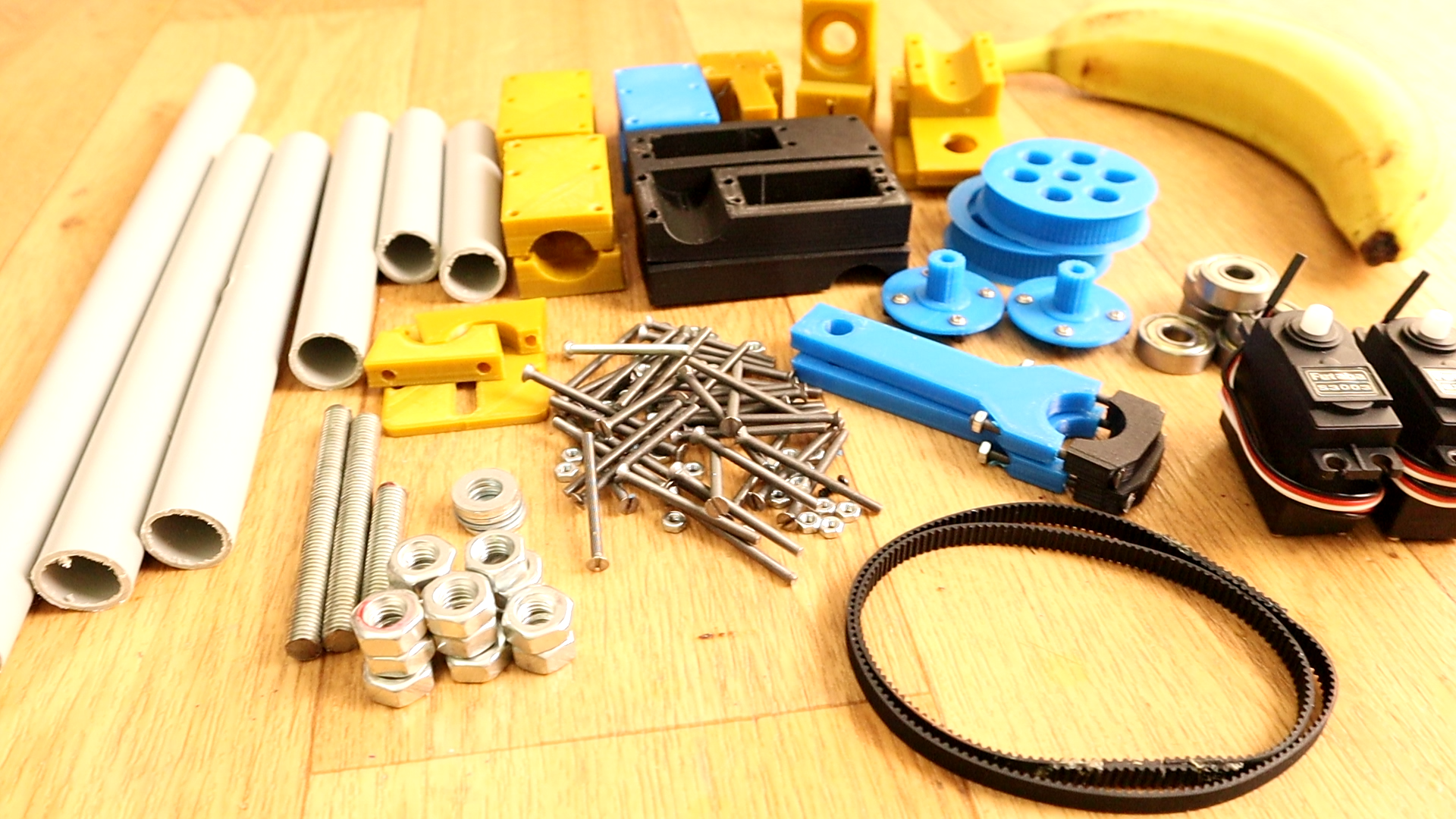
This is what we need for this. I’ve used some 2cm PVC tubes which probably aren’t the best choice. You have the full part list and the dimensions in the link above. We also need all the 3D printed files. There are a lot of printed files. Using 3 printers at the same time, it took me around 10 hours to print them all. Download and print each one. I’ve used PLA material, 0.4mm nozzle, 0.2mm layer height and a perimeter of 2 layers. We have plastic joints, gears, brackets and so on.
We also need 3 bits of 8mm screws and some nuts as well. 6 22mm bearings and two servo motors. I’ve used the futaba S3003 servo motors since these have quite some torque. We will also need some GT2 belts and probably some glue. And that’s it for the frame. So, let’s begin. I first mount the X axis of the gimbal.
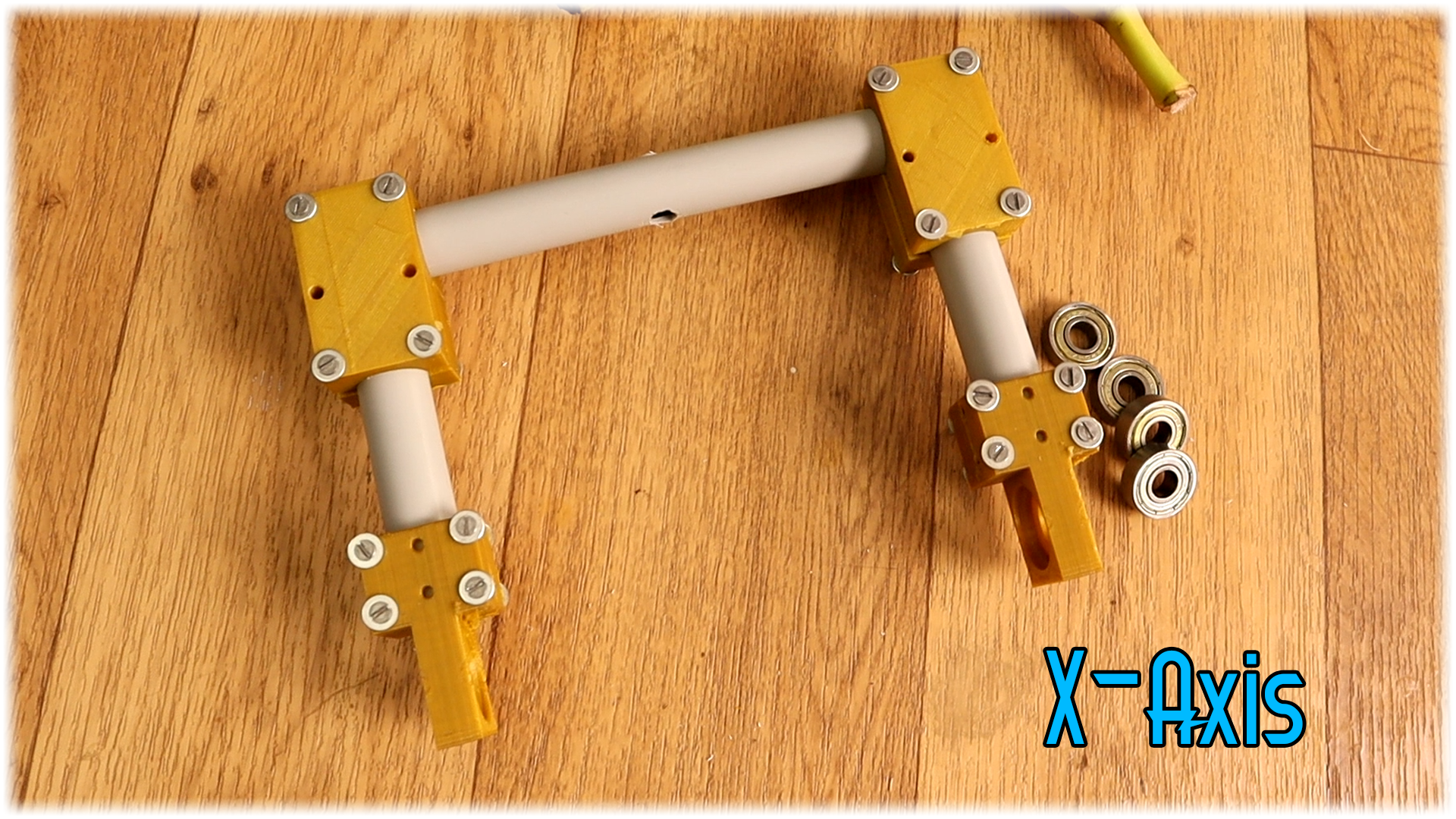
For that we need a 20cm long PVC tube with an 8mm hole exactly in the middle. Then we need the two printed plastic couplers and two more PCV tubes of 9cm. Now that we have the parts we start by adding the 3mm screws and washers to the plastic couplers. Don’t tight them too much. Now we take the 20cm long PVC tube and insert it into the plastic coupler follower by the two other smaller tubes. Make sure that the hole is in the middle and parallel to the smaller tubes and then you could tight the nuts.
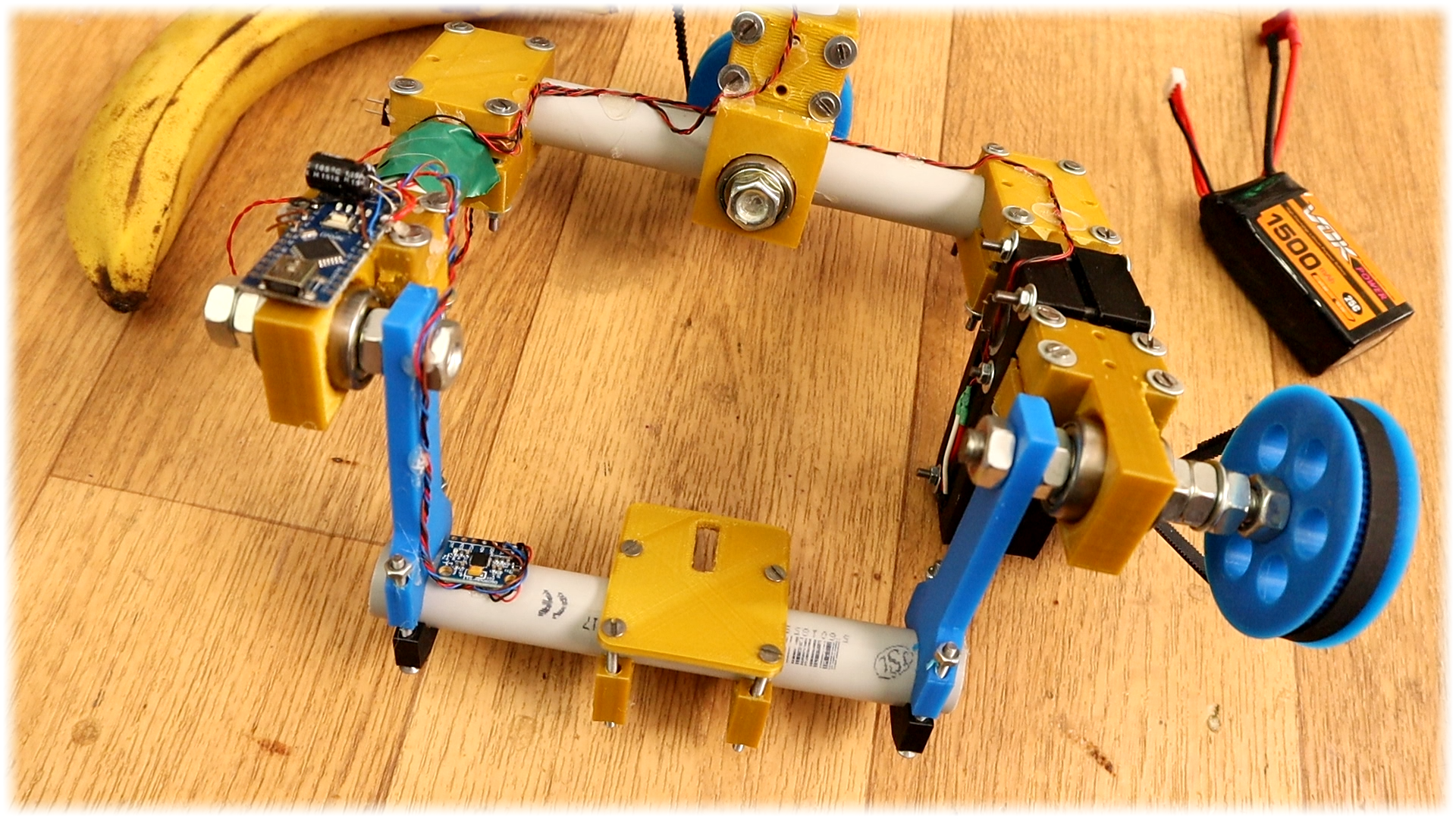
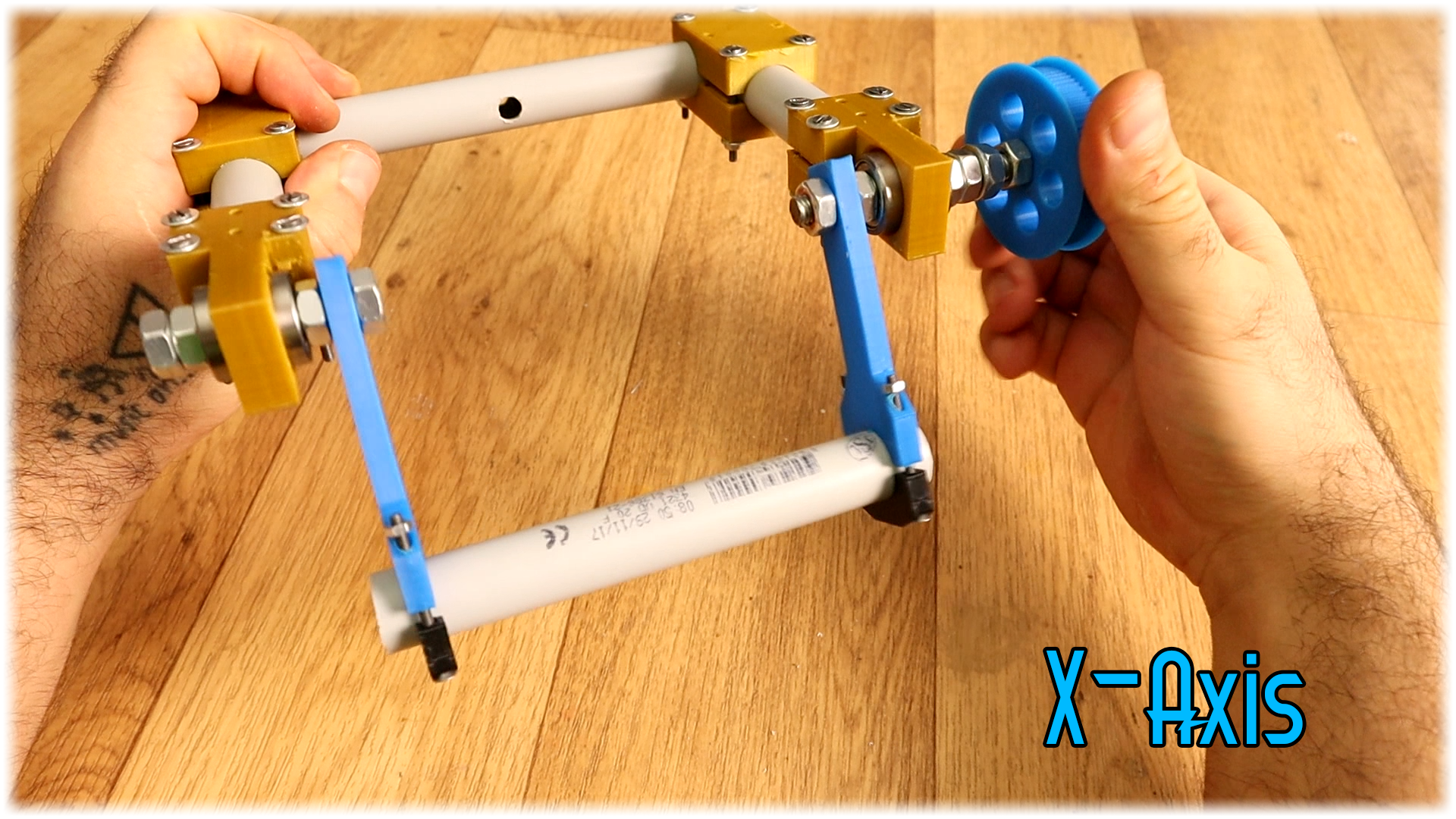
Now all is there to do is to add the big gear and the bearings. As in the photo below, first tight strong the nuts on an 8mm screw and the big 3D printed gear. Add the bearings to the support we have just amde annd then tight the screws. Now, you should add the swing 3D printed aprds and add anoter PVC tube and make sure it can rotate with no friction.
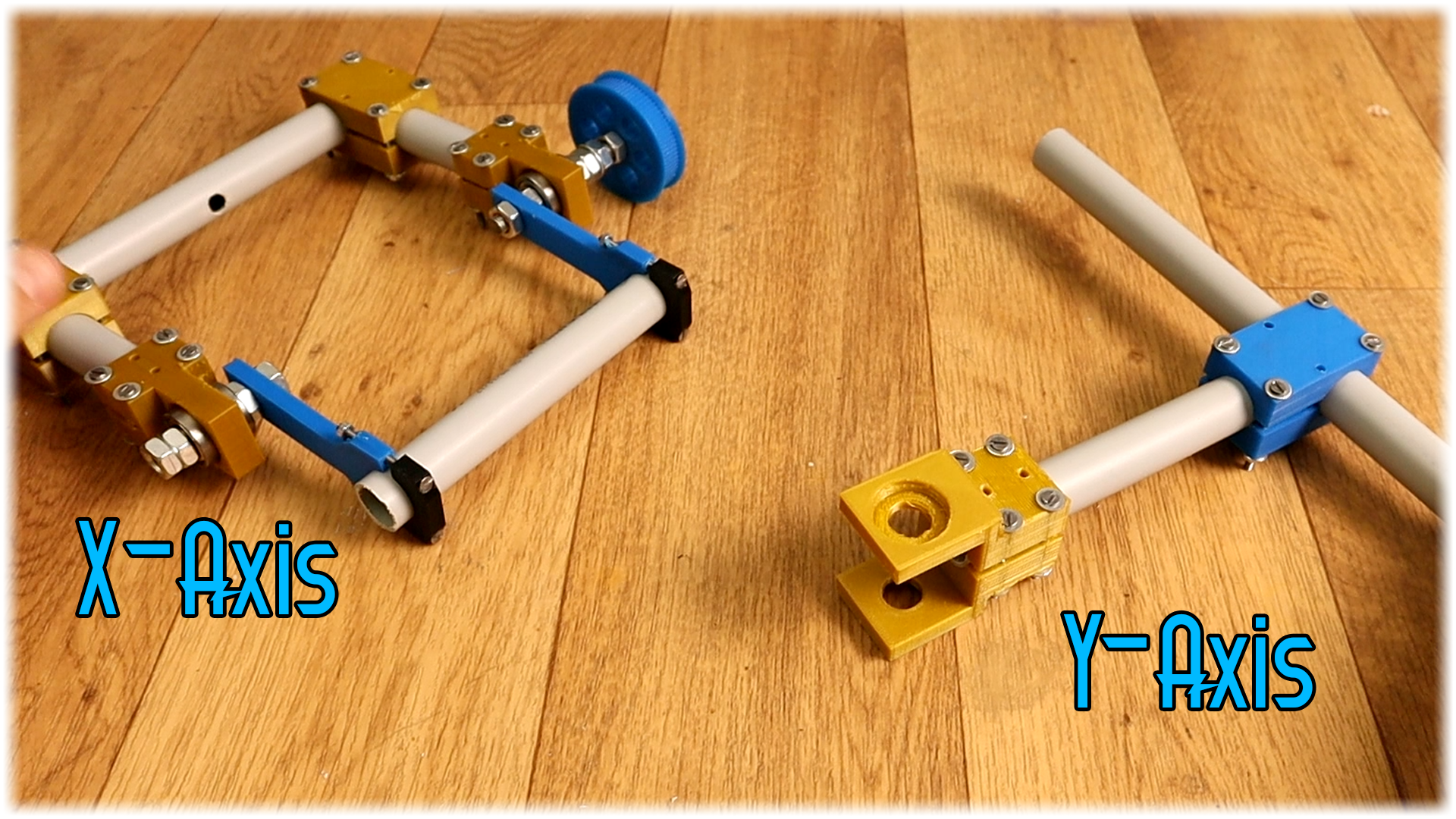
For the "Y-axis" just make the shape of a T with the 3D printed parts and the PVC tube. Now all we have to do is to join these ttwo aprts together and the gimbal should be ready. For that we will need the second 3D printed big gear and some more bearings.
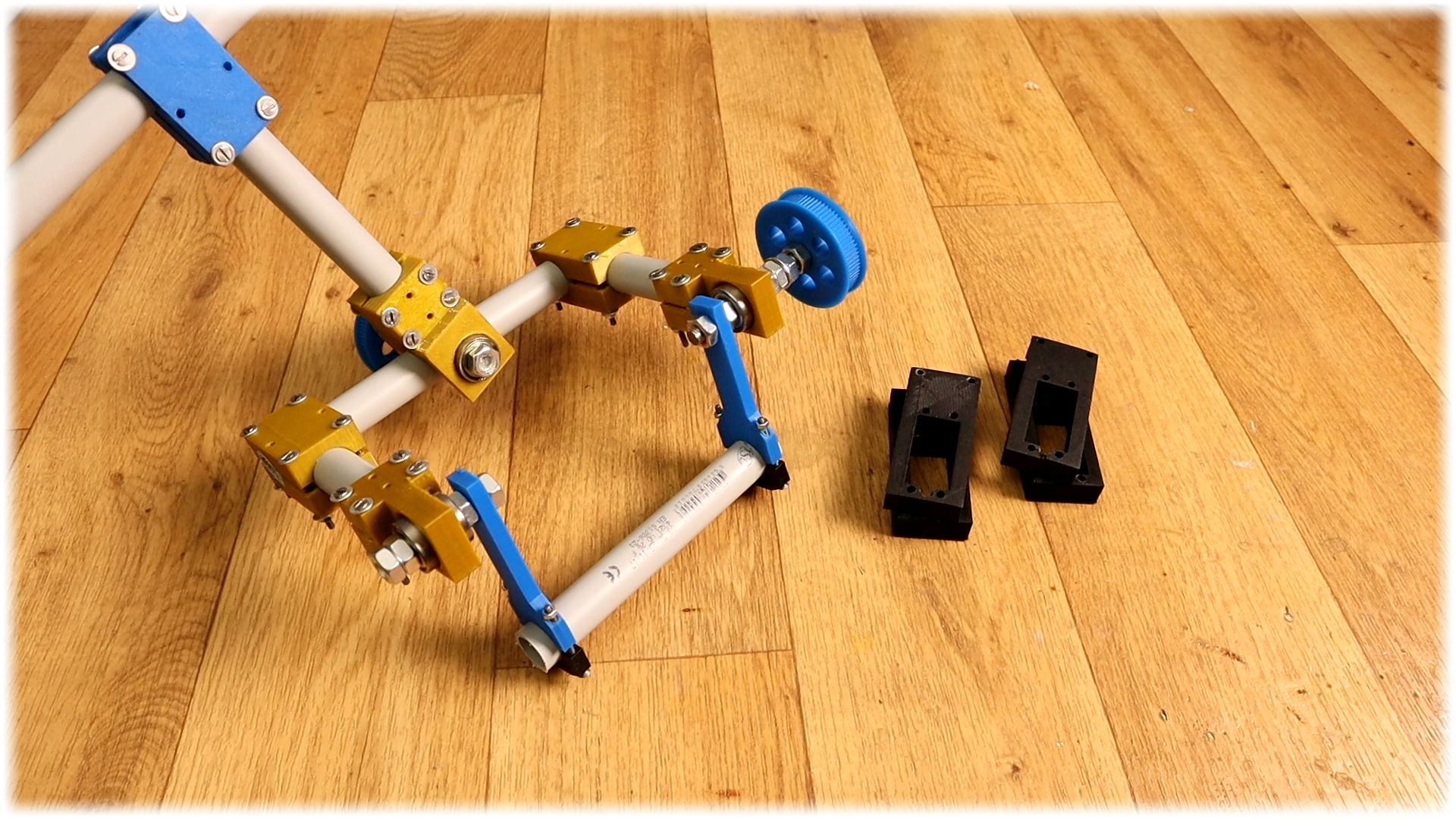
Finnaly, we join the parts together and we finish the frame. Add the bearings, add the 8mm screw and tight the nuts on the 3D printed gear. To be ture it won't slip, I've placed a bit of hot glue to the joints. THat's it, make sure each axis could move with no problem.
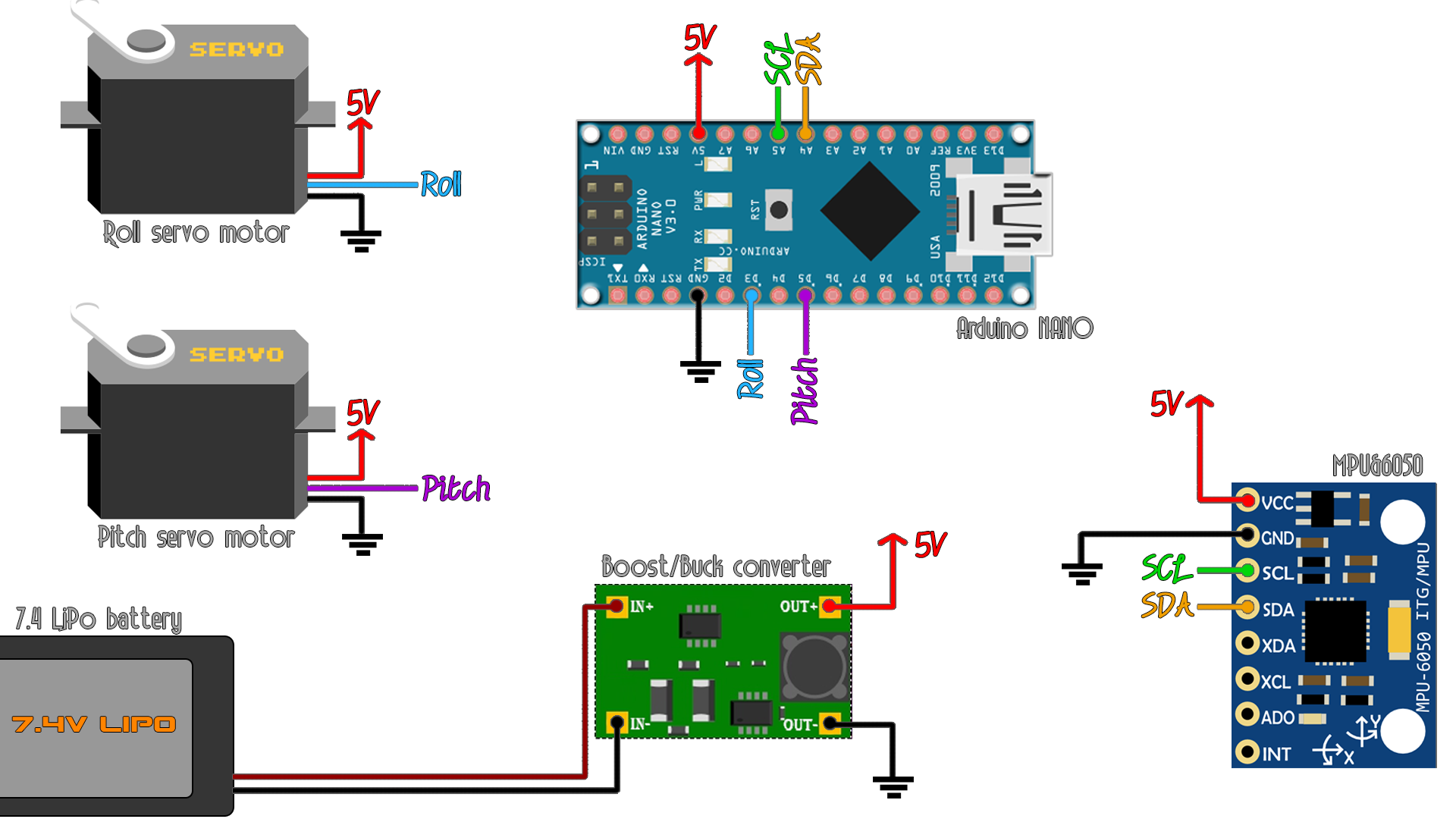
This is the scheamtic for the gimbal belwo. We haev the Arduino that will control everything. The MPU6050 gyro/acc module that will measure the angle. Then we have 2 servo motors to move the axis. Also, very important, there must be a 5V extrenal voltage regulator. The Arduino has a 5V regulator but that can't provide enough current for the motors. That's why we use the external one set to 5V output.
I place the IMU on the bottom tube right next to the camera support. Now we can detect the angle of the gimbal. I've palced the Arduino on the side next to the voltage regulator. I connect both motors to the Arduino pins. Tight the belts and it's time for the code.