This code is for the schematic.
/* Ultrasonic distance sensor code by ELECTRONOOBS 26/07/2018
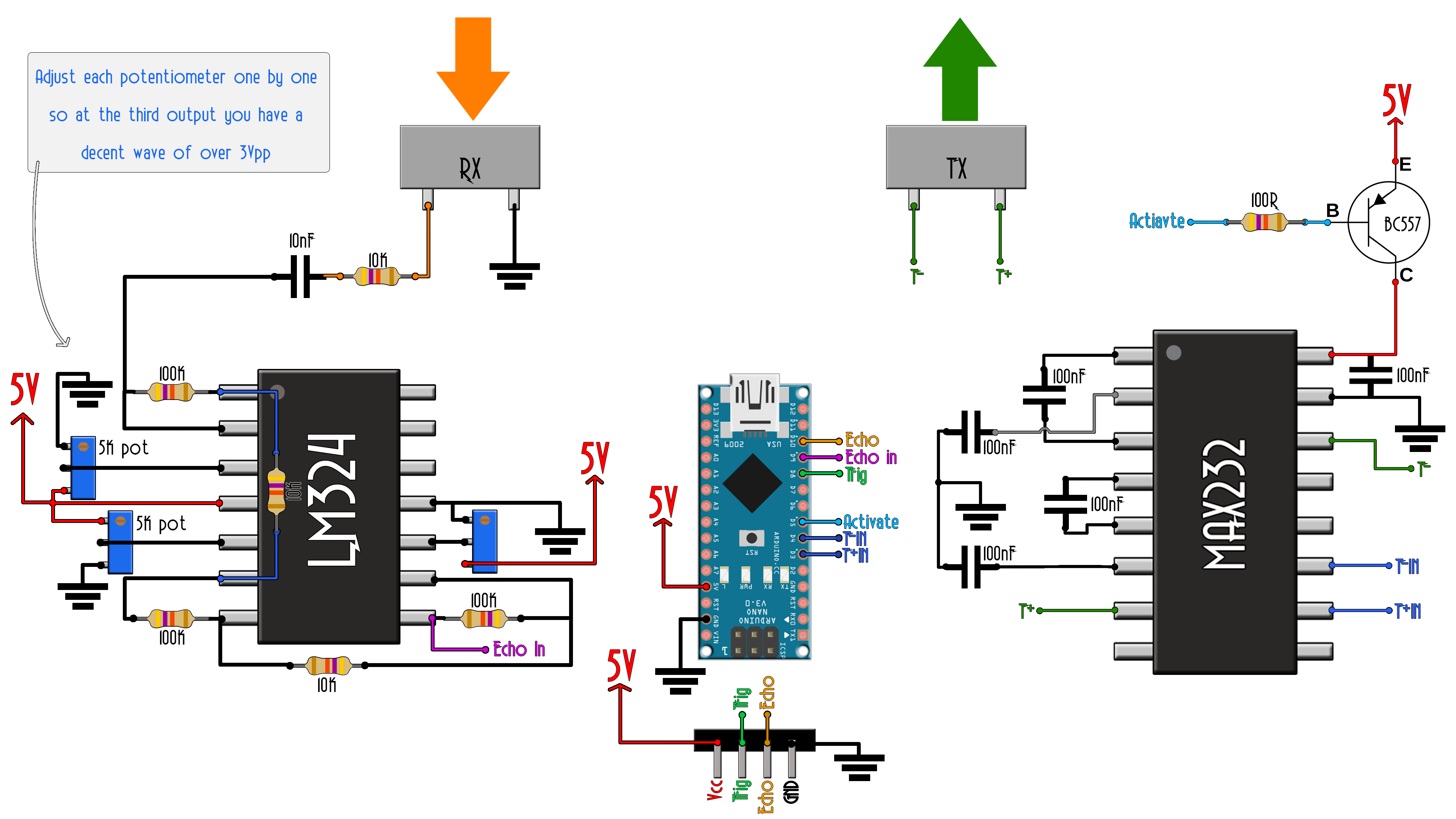
* Schematic: http://www.electronoobs.com/eng_arduino_tut36_sch1.php */
//Variables
bool triggered = false;
bool Trig_in_state = false;
void setup() {
DDRD |= B00111000; // Sets D3, D4, D5 outputs
DDRB |= B00000100; // Sets D10 as output
PCICR |= (1 << PCIE0); //enable PCMSK0 scan
PCMSK0 |= (1 << PCINT0); //Set pin D8 (trigger pin) set to fire interrupt on state change.
PCMSK0 |= (1 << PCINT1); //Set pin D9 (echo in) set to fire an interrupt on state change.
}
void loop() {
if(triggered)//Burst code starts...
{
delayMicroseconds(150);
/*We have seen a delay of 250uS when we've made tests
between the 10us trig pulse and the 8 cycles burt. For some reasons, if I put 250us delay,
I get 350 on the oscilloscope. That's why I've made a 150us delay.
*/
PORTD &= B11011111; //D5 LOW //Activate the MAX323 PNP transistor for supply
PORTD |= B00001000; //D3 HIGH
PORTD &= B11101111; //D4 LOW
delayMicroseconds(12);//12us so around 40KHz. Freq = 1/2*12us
PORTD &= B11110111; //D3 LOW
PORTD |= B00010000; //D4 HIGH
delayMicroseconds(12);
//We do this 8 times...
PORTD |= B00001000; //D3 HIGH
PORTD &= B11101111; //D4 LOW
delayMicroseconds(12);
PORTD &= B11110111; //D3 LOW
PORTD |= B00010000; //D4 HIGH
delayMicroseconds(12);
PORTD |= B00001000; //D3 HIGH
PORTD &= B11101111; //D4 LOW
delayMicroseconds(12);
PORTD &= B11110111; //D3 LOW
PORTD |= B00010000; //D4 HIGH
delayMicroseconds(12);
PORTD |= B00001000; //D3 HIGH
PORTD &= B11101111; //D4 LOW
delayMicroseconds(12);
PORTD &= B11110111; //D3 LOW
PORTD |= B00010000; //D4 HIGH
delayMicroseconds(12);
PORTD |= B00001000; //D3 HIGH
PORTD &= B11101111; //D4 LOW
delayMicroseconds(12);
PORTD &= B11110111; //D3 LOW
PORTD |= B00010000; //D4 HIGH
delayMicroseconds(12);
PORTD |= B00001000; //D3 HIGH
PORTD &= B11101111; //D4 LOW
delayMicroseconds(12);
PORTD &= B11110111; //D3 LOW
PORTD |= B00010000; //D4 HIGH
delayMicroseconds(12);
PORTD |= B00001000; //D3 HIGH
PORTD &= B11101111; //D4 LOW
delayMicroseconds(12);
PORTD &= B11110111; //D3 LOW
PORTD |= B00010000; //D4 HIGH
delayMicroseconds(12);
PORTD |= B00001000; //D3 HIGH
PORTD &= B11101111; //D4 LOW
delayMicroseconds(12);
PORTD &= B11000111; //D3, D4, D5 LOW //We have finished the burst. We set everything to low
PORTB |= B00000100;
/*Rember, after the 8 cycles, the echo out pin, D10, is set
to high till we receive the bounced echo signal.*/
triggered = false; //Reset the triggered value
}
}
ISR(PCINT0_vect){
//If digital D8 is high -> trigger was activated
if(PINB & B00000001){
Trig_in_state = true; //Set the Trig_in_state to true since we've detected the trigger pulse
}
//If trigger pin is low, the 10us pulse is over and we start the code
else if(Trig_in_state)
{
triggered = true; //Set trigered state to true
Trig_in_state = false; //Reset the D8 pin state
}
/*After the 8cycle burst each time there will be an interruption, that could be made by D8 or D9
since those are the only 2 pins set as interrupt active
So, since D8(trigger) is already low till next measurement, only D9 (echo in) could fire the interruption
So, when we detect that, we set the echo out pin to low (D10) and end the echo pulse
IMPORTANT: A better way to do this, is to also measure the echo in frequency to make sure
it is around 40KHz, but I haven't done that. Works like this as well.
*/
PORTB &= 11111011; //D10, echo pin out to LOW
}