This is the code for this project of a PID control for the balance with ping pong ball. You don't need any library. Just uplaod it to the Arduino and start tunning the PID constants, kp, ki and kd. Watch the video in order to see how to tune each of the P, I and D constants. Uplaod the code and connect the 5V power supply and add the ball. It should move and place the ball in the middle. Read the comments in the code for more. You must define the distance from the sensor to the middle of the balance.
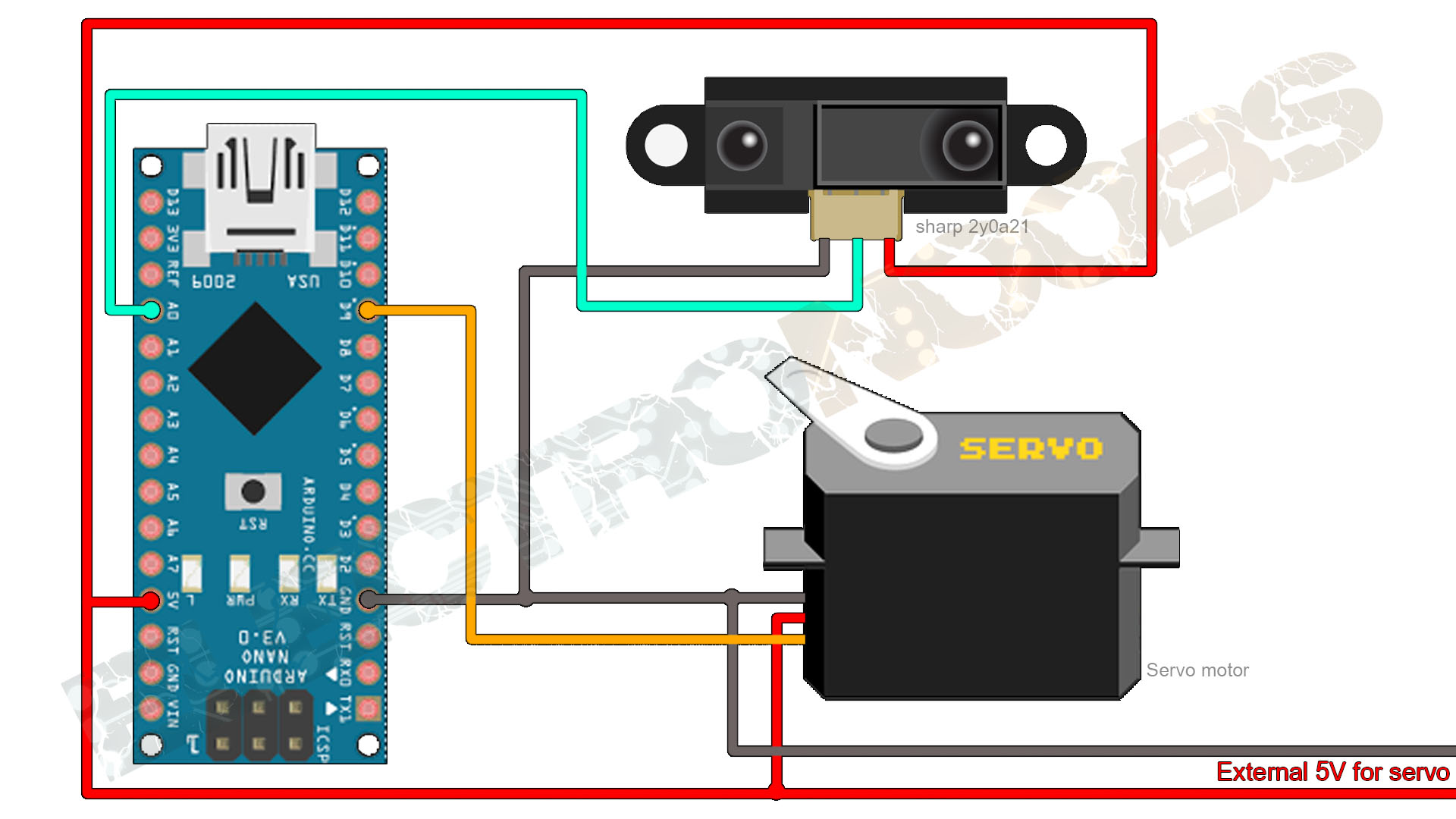
/* PID balance code with ping pong ball and distance sensor sharp 2y0a21
* by ELECTRONOOBS: https://www.youtube.com/channel/UCjiVhIvGmRZixSzupD0sS9Q
* Tutorial: http://electronoobs.com/eng_arduino_tut100.php
* Code: http://electronoobs.com/eng_arduino_tut100_code1.php
* Scheamtic: http://electronoobs.com/eng_arduino_tut100_sch1.php
* 3D parts: http://electronoobs.com/eng_arduino_tut100_stl1.php
*/
#include <Wire.h>
#include <Servo.h>
///////////////////////Inputs/outputs///////////////////////
int Analog_in = A0;
Servo myservo; // create servo object to control a servo, later attatched to D9
///////////////////////////////////////////////////////
////////////////////////Variables///////////////////////
int Read = 0;
float distance = 0.0;
float elapsedTime, time, timePrev; //Variables for time control
float distance_previous_error, distance_error;
int period = 50; //Refresh rate period of the loop is 50ms
///////////////////////////////////////////////////////
///////////////////PID constants///////////////////////
float kp=8; //Mine was 8
float ki=0.2; //Mine was 0.2
float kd=3100; //Mine was 3100
float distance_setpoint = 21; //Should be the distance from sensor to the middle of the bar in mm
float PID_p, PID_i, PID_d, PID_total;
///////////////////////////////////////////////////////
void setup() {
//analogReference(EXTERNAL);
Serial.begin(9600);
myservo.attach(9); // attaches the servo on pin 9 to the servo object
myservo.write(125); //Put the servco at angle 125, so the balance is in the middle
pinMode(Analog_in,INPUT);
time = millis();
}
void loop() {
if (millis() > time+period)
{
time = millis();
distance = get_dist(100);
distance_error = distance_setpoint - distance;
PID_p = kp * distance_error;
float dist_diference = distance_error - distance_previous_error;
PID_d = kd*((distance_error - distance_previous_error)/period);
if(-3 < distance_error && distance_error < 3)
{
PID_i = PID_i + (ki * distance_error);
}
else
{
PID_i = 0;
}
PID_total = PID_p + PID_i + PID_d;
PID_total = map(PID_total, -150, 150, 0, 150);
if(PID_total < 20){PID_total = 20;}
if(PID_total > 160) {PID_total = 160; }
myservo.write(PID_total+30);
distance_previous_error = distance_error;
}
}
float get_dist(int n)
{
long sum=0;
for(int i=0;i<n;i++)
{
sum=sum+analogRead(Analog_in);
}
float adc=sum/n;
//float volts = analogRead(adc)*0.0048828125; // value from sensor * (5/1024)
//float volts = sum*0.003222656; // value from sensor * (3.3/1024) EXTERNAL analog refference
float distance_cm = 17569.7 * pow(adc, -1.2062);
//float distance_cm = 13*pow(volts, -1);
return(distance_cm);
}