
 About me
About me  History
History  Let's learn
Let's learn  Contact us
Contact us  Arduino tutorials
Arduino tutorials Circuits tutorials
Circuits tutorials  Robotics tutorials
Robotics tutorials Q&A
Q&A Blog
Blog  Arduino
Arduino  Circuits
Circuits Robotics
Robotics  Modules
Modules  Gadgets
Gadgets  Printers
Printers  Materials
Materials  3D objects
3D objects  3D edit
3D edit  Donate
Donate  Reviews
Reviews  Advertising
Advertising




Brushed motors Arduino drone

Ok, now we have all the modules soldered in place. Is time to add the 4 msofets. Each with a pulldown of 10K and also a diode ad the output. We put some solder to the holes where we will connect the DC motors. We add the pins for the battery input.
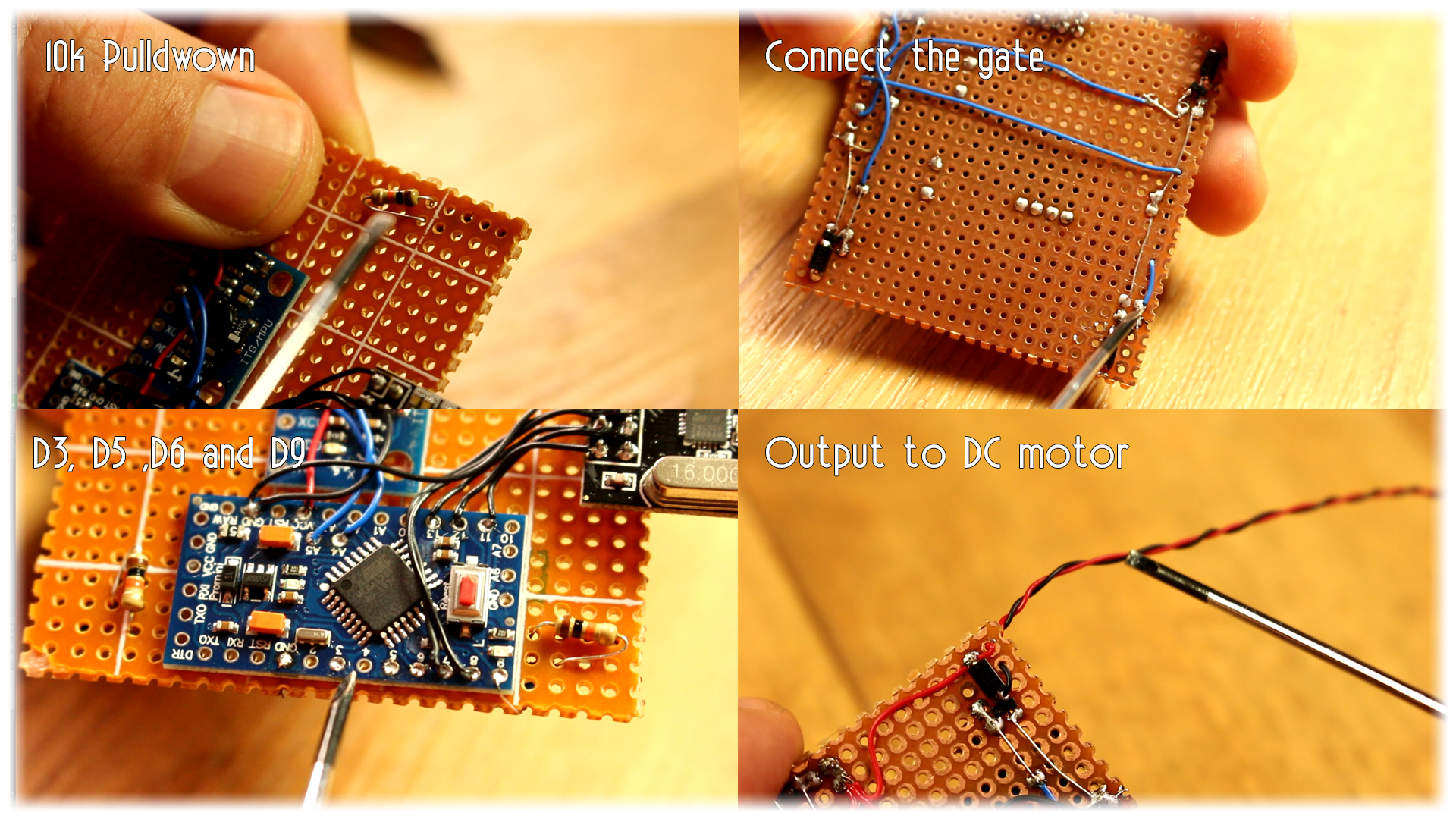
Before I solder the DC motors to the board, I applt 3V to each in order to see if they spin in the corredt direction and which will be the positive and negative wire. Then I solder the DC motor between 3.7V from the batter and the drain of the n-ch MOSFET.
Now I uplaod the next small example code to thest if the motors are spinning at a low speed. Uplaod the code and connect the battery and let's see.
//We define the pins for the mootrs
int front_left = 3;
int back_left = 5;
int front_right = 6;
int back_right = 9;
void setup() {
//Define the pins as outputs
pinMode(front_left,OUTPUT);
pinMode(back_left,OUTPUT);
pinMode(front_right,OUTPUT);
pinMode(back_right,OUTPUT);
}
void loop() {
analogWrite(front_left,50);
analogWrite(back_left,50);
analogWrite(front_right,50);
analogWrite(back_right,50);
delay(10);
}
Step 6 The code
Now we know that the motors are working. We should also test if the Radio connection and the MPU6050 are working well. For taht you ahve two example codes below. Upload first the MPU6050 code adn once uploaded, open the serial monitor and move the board around. The angle should change. If it works, test the radio connection.
upload the radio test code and power up the radio transmitter. Open serial monitor adn move the joysticks. The value for each cahnnel should change acording to the position of the joystick.

Now we know that each part works ok. The code that we will use first is a MultiWii platform as in the past tutorial on Arduino based drone for quadX drone. Ina future part we will make our own code but that doesn't work quite well yet, sorry.
Go to the link below and donwload that zip file. Inside you will have the MultiWii Arduino code and the Multiwii Java platform for 32 and 64 bits.
Connect the FTDI module to to the Arduino pro mini, open the code, select Arduino pro mini as programmer and upload the code. Now with the FTDI module connected, open the Java Multiwii Platform and let's see if everything is ok.
Download multiwii here:
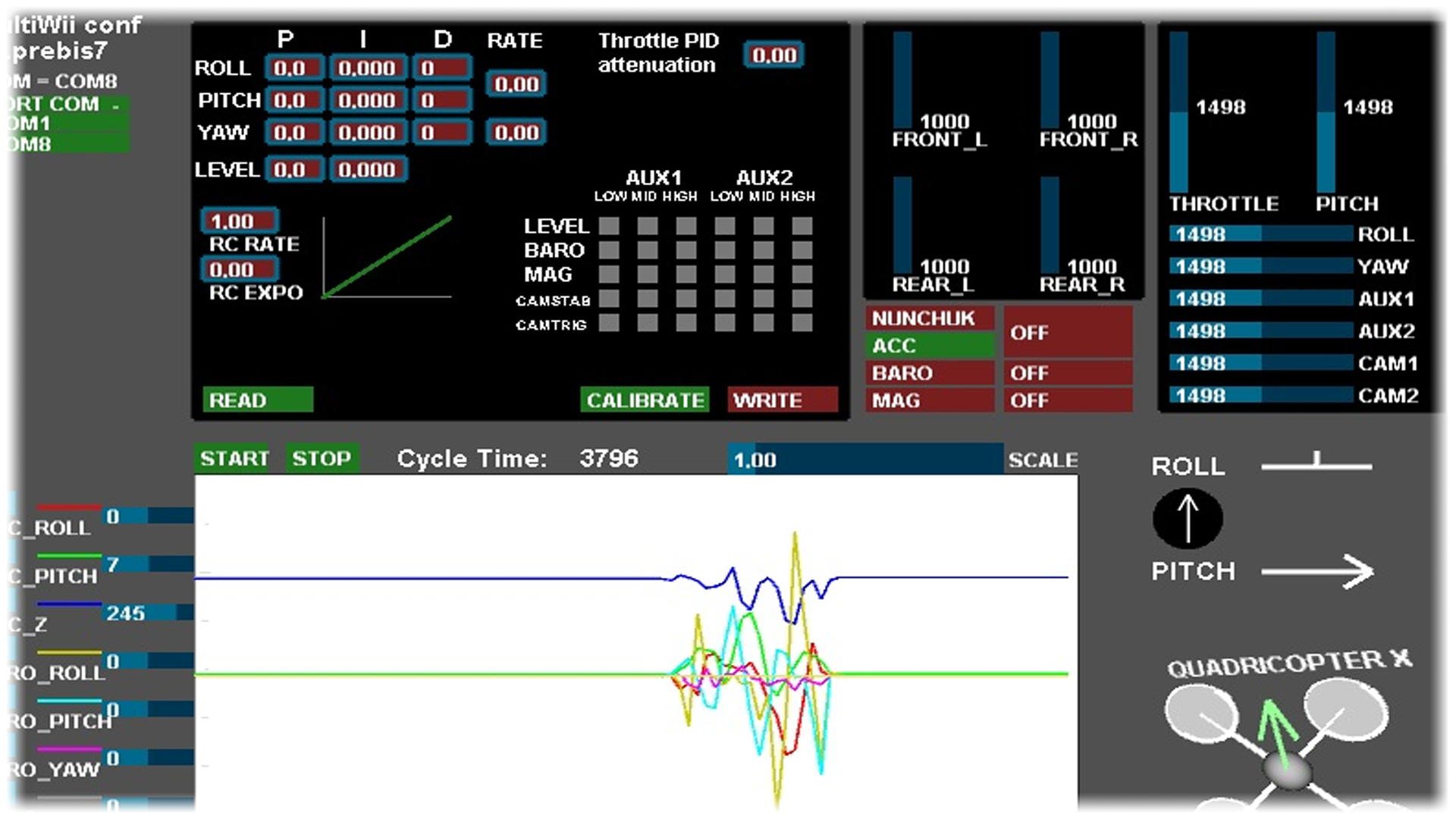
With the code uploaded, the FTDI connected and the Multiwii platform on, power the transmitter and chech if you can receive data for throttle, yaw, pithc and roll. Also the extra 2 AUX channel. To power the motors put throttle to minimum and yaw to maximum for 3 seconds. Now we can fly.